

步进电机35BYJ46
格式:pdf
大小:575KB
页数:3P
人气 :73
 4.3
4.3
描述: 主要技术参数: 型号 电压 相数 相电阻 步距角 减速比 启动频率 启动转矩 定位转 矩 接线图 外形图 · 类别: 减速永磁步进电动机 ->35BYJ46 · 品名: 35BYJ46 · 点击: 709 次 Model Voltage No.of Phase Resistan ce Step Angle Moderating Ratio Starting Frequency Pulling Torque (100P.P.S) Detent Torque Wdg Fig 单位 V Ω Deg P.P.S gf.cm gf.cm 35BYJ46-01 12 4 120 7.5/85.25 1:85.25 ≥450 ≥800 ≥350 a 2.3 *以上表中所列仅为代表性产品 典型客户:



编辑推荐下载

步进电机24BYJ48
格式:pdf
大小:90KB
页数:1P
4.5
绝缘介电强度 无击穿或飞弧 空载牵入频率空载牵出频率绝缘电阻 dc500v(mω)mn.m 摩擦转矩 ppspps ccw转向时的励磁顺序 引出线 颜色序号 插头12345678 1-2相励磁 0.8 2.7 191 6 8 10 ★★ 1.59 10±0.5 2 ++++++++ 注:“★”为关键设计要求,“▲”为重要设计要求。 -- -- 日(01-31) 月(1-9、x、y、z) 2005年(公历末两位) 安装面输出轴端视电机轴为 05919 2 ≥500 1 - - --- --- 6±0.2 3 0-0 .1 5 7 橙 红 2 1 ac600v,1ma,1s ≥800 温升 k ≤60 噪音db(a) 150pps ≤35 china 1.未注公差尺寸按gb/t1804-c级。 2.整机需满足《雷利公司环保物质管理规定》要求。★ 技
24BYJ-48步进电机
格式:pdf
大小:348KB
页数:3P
4.7
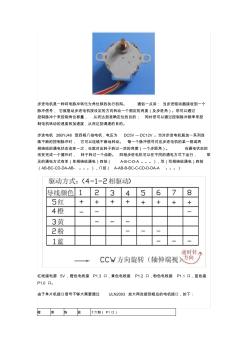
24byj-485v步进电机 适用于单片学习机学习或空调导风条驱动及安防摄像头监控调整方向 驱动 电机名称:减速永磁步进电机 电机型号:24byj-48-5v 驱动电压:5v 驱动方式:四相八拍 齿轮减速比:1/64 【功能特点】 采用uln2003驱动,使用方便 优质步进电机,带齿轮减速,噪音极低,运转平稳 5v即可驱动,方便单片机开发者使用 开放性接口,也可用通过本板驱动其他步进电机 适用于51/avr/avr/arm等各种平台,机器人设计开发必备 技术参数 1.额定电压:5vdc.2.直流电阻:60ω±7%(25℃). 3.减速比:1/644.步距角:5.625°/64 5.驱动方式:四相八拍. 6.牵入转距:≥350gf.cm(工作频率:100pps). 7.打滑扭力:800~1300
步进电机35BYJ46热门文档
28BYJ48参数特性(步进电机)
格式:pdf
大小:131KB
页数:2P
4.6
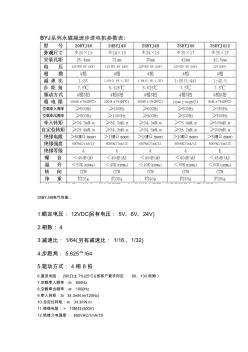
28byj48电气性能: 1.额定电压:12vdc(另有电压:5v、6v、24v) 2.相数:4 3.减速比:1/64(另有减速比:1/16、1/32) 4.步距角:5.625°/64 5.驱动方式:4相8拍 6.直流电阻:200ω±7%(25℃)(按客户要求而定:80、130欧姆) 7.空载牵入频率:≥600hz 8.空载牵出频率:≥1000hz 9.牵入转矩:≥34.3mn.m(120hz) 10.自定位转矩:≥34.3mn.m 11.绝缘电阻:>10mω(500v) 12.绝缘介电强度:600vac/1ma/1s 13.绝缘等级:a 14.温升:<50k(120hz) 15.噪音:<40db(120hz) 16.重量:大约40g 17.未注公差按:gb1804-m 18.转向:ccw
28BYJ-48步进电机共8页
格式:pdf
大小:23KB
页数:8P
4.8
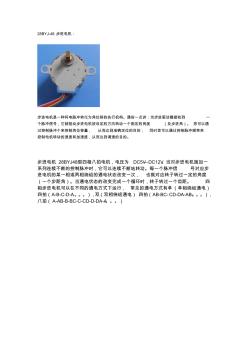
第1页 28byj-48步进电机: 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一 个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通 过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来 控制电机转动的速度和加速度,从而达到调速的目的。 步进电机28byj48型四相八拍电机,电压为dc5v—dc12v。当对步进电机施加一 系列连续不断的控制脉冲时,它可以连续不断地转动。每一个脉冲信号对应步 进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度 (一个步距角)。当通电状态的改变完成一个循环时,转子转过一个齿距。四 相步进电机可以在不同的通电方式下运行,常见的通电方式有单(单相绕组通电) 四拍(a-b-c-d-a。。。),双(双相绕组通电)四拍(ab-b
步进电机_28BYJ-48的原理及使用
格式:pdf
大小:354KB
页数:7P
4.7
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个 脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过 控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控 制电机转动的速度和加速度,从而达到调速的目的。 步进电机28byj48型四相八拍电机,电压为dc5v—dc12v。当对步进电机施加一系列连 续不断的控制脉冲时,它可以连续不断地转动。每一个脉冲信号对应步进电机的某一相或两 相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。当通电状态的 改变完成一个循环时,转子转过一个齿距。四相步进电机可以在不同的通电方式下运行,常 见的通电方式有单(单相绕组通电)四拍(a-b-c-d-a。。。),双(双相绕组通电)四拍 (ab-bc-cd-da-ab-。。。)
28BYJ-48步进电机
格式:pdf
大小:744KB
页数:11P
4.3
28byj-48步进电机: 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一 个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通 过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来 控制电机转动的速度和加速度,从而达到调速的目的。 步进电机28byj48型四相八拍电机,电压为dc5v—dc12v。当对步进电机施加一 系列连续不断的控制脉冲时,它可以连续不断地转动。每一个脉冲信号对应步 进电机的某一相或两相绕组的通电状态改变一次,也就对应转子转过一定的角度 (一个步距角)。当通电状态的改变完成一个循环时,转子转过一个齿距。四 相步进电机可以在不同的通电方式下运行,常见的通电方式有单(单相绕组通电) 四拍(a-b-c-d-a。。。),双(双相绕组通电)四拍(ab-bc-cd-d
步进电机35BYJ46精华文档
步进电机28BYJ(个人总结版)
格式:pdf
大小:1.4MB
页数:12P
4.6
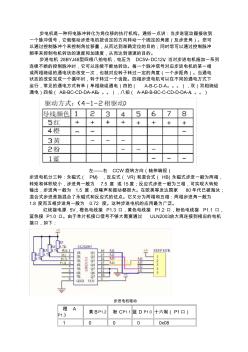
步进电机28byj-48介绍和驱动电路及程序 28byj-5v步进电机简介 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱 动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度 (及步进角)。您可以通过控制脉冲个来控制角位移量,从而达到准确定位的目 的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调 速的目的。 当对步进电机施加一系列连续不断的控制脉冲时,它可以连续不断地转动。 每一个脉冲信号对应步进电机的某一相或两相绕组的通电状态改变一次,也就对 应转子转过一定的角度(一个步距角)。当通电状态的改变完成一个循环时,转 子转过一个齿距。四相步进电机可以在不同的通电方式下运行,常见的通电方式 有单(单相绕组通电)四拍(a-b-c-d-a。。。),双(双相绕组通电)四拍 (ab-bc-cd-da-ab-。。。),八拍(
BYJ步进电机资料及调速程序
格式:pdf
大小:683KB
页数:6P
4.4
步电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到 一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可 以通过控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲 频率来控制电机转动的速度和加速度,从而达到调速的目的。 步进电机28byj48型四相八拍电机,电压为dc5v—dc12v。当对步进电机施加一系列 连续不断的控制脉冲时,它可以连续不断地转动。每一个脉冲信号对应步进电机的某一相 或两相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。当通电 状态的改变完成一个循环时,转子转过一个齿距。四相步进电机可以在不同的通电方式下 运行,常见的通电方式有单(单相绕组通电)四拍(a-b-c-d-a。。。),双(双相绕组 通电)四拍(ab-bc-cd-da-ab-。。。),八拍(a-ab-b-bc-c
5V步进电机资料-28BYJ
格式:pdf
大小:72KB
页数:2P
4.6
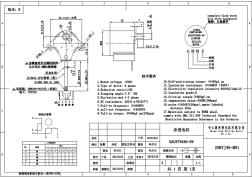
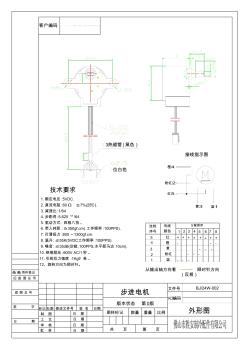
比例重量数量图样标记 第页共页 日期签名修改文件号处数标记 制图 工艺 审核 批准日期 借(通)用件登记 旧底图总号 底图总号 签字 日期 杨宇城 步进电机 k3编码 外形图 文件号 客户编码 版本状态第0版 日期 日期 日期2008-11-17 分配顺序 红 橙 黄 粉 蓝 线 色 序 号 顺时针方向 黄蓝 红 橙 粉 技术要求: 1.工作电压:dc5v 2.相数:4,减速比:1/64,步距角:5.625°/64; 3.驱动方式:四相八拍; 4.牵入转距:≥450gf.cm(100hz); 5.打滑扭距:≥800-2200gf.cm; 6.摩擦转距:34.3-196mn.m(转子二相锁定情况下); 7.绝缘电阻:≥10mω,电气强度:a
步进电机24BYJ-48(5V)资料
格式:pdf
大小:76KB
页数:1P
4.6
步进电机 比例重量数量图样标记 第页共页 日期签名修改文件号处数标记 制图 工艺 审核 批准日期 借(通)用件登记 旧底图总号 底图总号 签字 日期 接线指示图 k3编码 3热缩管(黑色) 位白色 红5 黄3 粉红2 蓝1 橙4 从输出轴方向看 技术要求 12、旋转方向为顺时针。 9.噪音:≤35db(空载,100pps,水平距马达10cm). 8.温升:≤55k(5vdc工作频率:100pps). 11.引线拉力强度:1kgf/条. 10.绝缘耐压:600vac/1秒. 3.减速比:1/64 5.驱动方式:四相八拍. 1.额定电压:5vdc. 7.打滑扭力:800~1300gf.cm. 6.牵入转距:≥350gf.cm(工作频率:100pps). 4.步距角:

28BYJ48型步进电机的控制方法
格式:pdf
大小:63KB
页数:6P
4.3
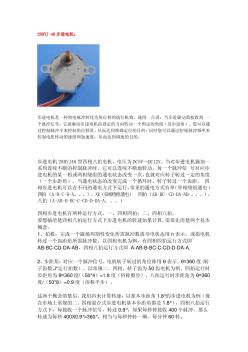
28byj48型步进电机的控制方法 2011-03-1323:02:00|分类:单片机技术|举报|字号订阅 前不久弄到一只28byj48型步进电机,没有资料,从网 上查找,搜到一些资料,但按照网上介绍的程序实验,都没 有成功。后来根据资料的原理部分,试着自己编写了一段程 序,经过多次实验调试,终于成功了。 哈哈,收获不小!!! 步进电机是一种将电脉冲转化为角位移的执行设备。通 俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步 进电机按设定的方向转动一个固定的角度(即步进角)。我 们可以通过控制脉冲个数来控制角位移量,从而达到准确定 位的目的;同时我们可以通过控制脉冲频率来控制电机转动 的速度和加速度,从而达到调速的目的。 28byj48型步进电机是四相八拍电机,电压为dc5v~ dc12v。当对步进电机按一定顺序施加一系列连续不断的控 制脉冲时,它可以连续不断地转动
步进电机35BYJ46最新文档

5V4相5线步进电机全新步进电机
格式:pdf
大小:15KB
页数:2P
4.4
5v4相5线步进电机全新步进电机/减速电机 24byj-48-5v 额定电压5vdc空载牵入频率>600hz 相数4空载牵出频率>1000hz 减速比1/64牵入转矩>34.3mn.m(120hz) 步距角5.625°/64自定位转矩>34.3mn.m 直流电阻200ω±7%(25℃) 温 升 10mω(500v) 噪 声 <40db(120hz,noload,10cm) 介电强度600vac/1ma/1s 重 量 about32g 绝缘等级a 直径:28mm 电压:5v 步进角度:5.625x1/64 5线4相可以用普通uln2003芯片驱动, 也可以接成2相使用可以配套开发板

步进电机_28BYJ-48介绍和驱动及c编程
格式:pdf
大小:753KB
页数:13P
4.3
步进电机28byj-48介绍和驱动及编程 28byj-48步进电机: 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个 脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过 控制脉冲个来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控 制电机转动的速度和加速度,从而达到调速的目的。 步进电机28byj48型四相八拍电机,电压为dc5v—dc12v。当对步进电机施加一系列连 续不断的控制脉冲时,它可以连续不断地转动。每一个脉冲信号对应步进电机的某一相或两 相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。当通电状态的 改变完成一个循环时,转子转过一个齿距。四相步进电机可以在不同的通电方式下运行,常 见的通电方式有单(单相绕组通电)四拍(a-b-c-d-a。


步进电机和减速电机的区别
格式:pdf
大小:13KB
页数:2P
4.7
步进电机和减速电机的区别 在回答这个问题之前,先来了解下什么是步进电机和 减速电机? 步进电机是将电脉冲信号转变为角位移或线位移的开 环控制元步进电机件。在非超载的情况下,电机的转速、停 止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变 化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步 进电机按设定的方向转动一个固定的角度,称为“步距角”, 它的旋转是以固定的角度一步一步运行的。可以通过控制脉 冲个数来控制角位移量,从而达到准确定位的目的;同时可 以通过控制脉冲频率来控制电机转动的速度和加速度,从而 达到调速的目的。 减速电机是由减速器(齿轮箱)+电机组成而成,电机 提供的是高速转速,但力矩很小,惯性大;减速器的功能则 是降低转速、提升扭矩,降低惯性,已到达理想的转速和力 矩;比如常见的有电动窗帘、电动卷闸门,都采用了减速电 机,转速慢、力矩大。 简单的说步进电机可以可以定长
减速步进电机28BYJ-48最简单的驱动方法
格式:pdf
大小:601KB
页数:2P
4.5
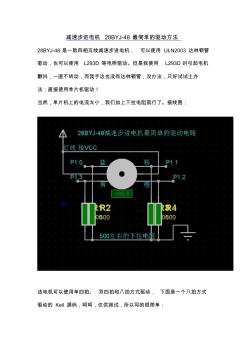
减速步进电机28byj-48最简单的驱动方法 28byj-48是一款四相五线减速步进电机,可以使用uln2003达林顿管 驱动,也可以使用l293d等电桥驱动。但是我使用l293d时引起电机 颤抖,一直不转动,而我手边也没有达林顿管,没办法,只好试试土办 法:直接使用单片机驱动! 当然,单片机上的电流太小,我们加上下拉电阻就行了。接线图: 该电机可以使用单四拍、双四拍和八拍方式驱动,下面是一个八拍方式 驱动的keil源码,呵呵,仅供测试,所以写的很简单: 看个效果图:
步进电机自动控制系统
格式:pdf
大小:1.1MB
页数:24P
4.5
1/24 步进电机自动控制系统 设计内容 设计用pc机对四相步进电机,方向,步数及自动化控制系统,并编写汇编程序实现相应轻 能。 设计要求 (1)设计控制系统硬件电机。 (2)由8255键盘控制电机的方向,走的步数,并由数码管显示相应的参数。 (3)在命令执行结束后,由pc内部扬声器发出信号提示。 设备与器材 pc机一台,tpc-1实验台一个,并行接口8255一片,步进电机一个,led数码管4个, 74ls164按键11个,gal芯片一个,74ls245一片。矚慫润厲钐瘗睞枥庑赖賃軔朧。 硬件方案 硬件共分成5个模块:①译码驱动电路,②8255控制键盘模块③8255led显示模块,④步 电机驱动模块,⑤步进电机模块聞創沟燴鐺險爱氇谴净祸測樅。 a)译码驱动电路 方案一使用适当的门电路来实现不同地址的,用74ls245做数据驱

步进电机四相八拍驱动程序
格式:pdf
大小:39KB
页数:7P
4.3
/*---------------------------------------------------------------------------------------------------- 名称:步进电机四相八拍驱动程序 文件名:steper.c 作者:eastboy e-mail:eastboy_007@163.com 日期:2008年7月16日 版本:1.0 申明:按键部分程序参考了raosibin的4×4按键状态机思想程序 说明: 1.可通过按键选择正转或反转,碰到限位开关后自动微调上一次微调值后停止; 2.可通过按键微调,即低速转动,以便精确调整位置; 3.仿真时通过两个按钮模拟前后限位开关,以模拟实际生活当中步进电机带轴运动时部 件的前后电限位, 程序并可自动记住以前后限位开关为基点的微调步数; 4.本程序只是通过了软件功能仿真

基于AVR单片机的35BYJ46型四相八拍异步电机驱动设计
格式:pdf
大小:69KB
页数:3P
4.6
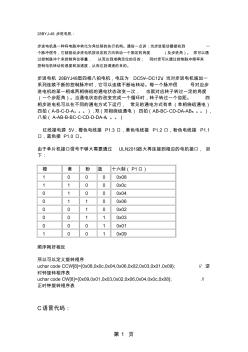
0引言 随着数字化技术发展,数字控制技术[1,2]得到了 广泛而深入的应用。步进电机 [3~5] 是一种把数字电脉 冲信号[6]转换成机械角位移的机电元件,以脉冲信号 进行控制,因此更适应现代化的数字控制技术的发展 需要。步进电机因具有控制简单、价格低、维护容易、 定位精度高、控制成本低等特点而得到广泛应用。对 于小功率的步进电机,通常有专门的驱动芯片进行驱 动,外围电路也非常简单。针对35byj46型四相八 拍步进电机,采用了uln2003驱动电路,通过c语 言[7]对avr单片机atmega8编程[8],实现了对步进 基于avr单片机的四相步进电机驱动设计 闫爱军,范海明,周钧 (中国船舶重工集团公司第七一八研究所,河北邯郸056027) 摘要:主要介绍了由avr单片机为核心的四相八拍步进电机的驱动设计,并用
步进电机35BYJ46相关
文辑推荐
知识推荐
百科推荐

职位:桥梁工程师
擅长专业:土建 安装 装饰 市政 园林


