

中型足球机器人电磁铁式踢球机构的建模与控制
格式:pdf
大小:607KB
页数:4P
人气 :90
 4.6
4.6
运用机理建模的方法,简化电容和电磁铁的工作模式,建立电磁铁式踢球机构的物理与数学模型。实验表明:该模型能够精准反映机构性能,且控制简单。



 足球机器人气动踢球系统建模与射程控制
足球机器人气动踢球系统建模与射程控制 足球机器人气动踢球系统建模与射程控制
针对robocup中型组足球机器人比赛需求,设计一套可以精确控制踢球距离的气动踢球系统。同时对系统进行建模分析,在大量实验的基础上,采用多元线性回归分析的方法确定影响踢球效果的各因素之间的关系。最后对系统进行了验证,使踢球的第一落点达到"要踢多远就踢多远"的效果,实现精确的射程控制。
小型足球机器人踢球器机电一体化设计 小型足球机器人踢球器机电一体化设计
装有踢球器的机器人可以出色地完成机器人足球比赛任务。本文对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分“智能化”的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性,较好地适应了整个机器人的性能要求。
编辑推荐下载
小型足球机器人踢球器机电一体化设计 小型足球机器人踢球器机电一体化设计
格式:pdf
大小:499KB
页数:3P
4.5
装有踢球器的机器人可以出色地完成机器人足球比赛任务。对踢球器的概念设计进行了分析,比较详细地说明了robocup小型足球机器人的具体设计和工作原理。通过机械部分"智能化"的设计,使得踢球器的控制过程简单而有效,具有很强的鲁棒性。较好地适应了整个机器人的性能要求。
一种足球机器人场地白线的提取方法 一种足球机器人场地白线的提取方法
格式:pdf
大小:947KB
页数:5P
4.3
基于折反射原理的全景视觉系统,由于能获得大范围视野的环境信息、因其高实时性和高性价比而被广泛应用在视频监控、视频会议和足球机器人等领域。但是,该系统采用的凸面反射镜,由于存在对场景的压缩而使得实际场景中的一些规则物体(比如直线)的成像存在很大的变形,给提取这些特征带来了困难。而足球机器人比赛场景中的白色标志线是不可多得的参考信息,如果能快速准确地提取出全部或部分白色标志线信息,将给机器人的决策系统提供很大的帮助,从而提高机器人的整体性能。以足球机器人比赛环境为背景,将场地白色标志线的边缘像素点转化到:实际距离和图像像素距离成线性变换关系的图像空间,利用一种结合数字罗盘航向角度信息的hough变换方法提取场地白色标志线信息。试验证明该方法具备很大的可行性。
中型足球机器人电磁铁式踢球机构建模与控制热门文档
基于MSP430的微型足球机器人无线通信子系统的设计 基于MSP430的微型足球机器人无线通信子系统的设计
格式:pdf
大小:514KB
页数:未知
4.7
无线通信子系统是微型足球机器人比赛系统中的至关重要部分,它起到桥梁的作用。论文采用msp430f149单片机作为无线发送和接收控制芯片,首先上位机将控制命令通过计算机串口传输到单片机中,然后单片机控制无线发射装置将指令以广播的方式发送给装有无线接收芯片的足球机器人,最后机器人上的控制芯片按照接收到的指令决定足球机器人左右轮的转速,从而实现对足球机器人的控制。
涵道捡乒乓球机器人的设计与实现探究 涵道捡乒乓球机器人的设计与实现探究
格式:pdf
大小:74KB
页数:2P
4.4
文章设计了一种自动乒乓球捡球机器人,该机器人采用stm32单片机作为控制系统,利用涵道的高速旋转,使壳体内外产生一定的压强差,将外界的乒乓球压进壳体,实现自动捡球的目的,在装置的最底部安装了可以旋转的拨球装置,尽量的做到整个壳体的密闭性。
用于水下机器人抛载装置的水下电磁铁总体设计 用于水下机器人抛载装置的水下电磁铁总体设计
格式:pdf
大小:67KB
页数:未知
4.6
抛载装置是水下机器人的重要安全保障措施,要求具备良好的可靠性和维护性能。与目前广泛采用的多种抛载方式相比较,采用水下电磁铁触发机械抛载装置具有动作可靠,结构简单,使用和维护方便的优点。本文通过分析和提出水下机器人对于电磁铁设计参数和使用工况的具体需求,对电磁铁的各个部分进行了总体设计。
美最新研制乒乓球机器人可用于建造火星基地 美最新研制乒乓球机器人可用于建造火星基地
格式:pdf
大小:360KB
页数:未知
4.4
腾讯科学讯(悠悠/编译)据英国每日邮报报道,乍一看它们犹如普通的乒乓球,然而专家表示这种微型机械体是未来派机器人,甚至能够帮助人类在其它星球上建造人类基地。
球机的安装
格式:pdf
大小:8KB
页数:3P
4.4
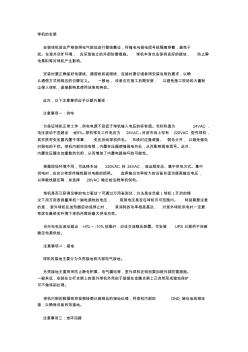
球机的安装 安装球机前应严格按照电气规范进行管线敷设,将强电与弱电信号线隔离穿敷,避免干 扰。在室外空旷环境,应采取独立的外部防雷措施。球机本身也应保持良好的接地,防止静 电累积等对球机产生影响。 安装时要正确接好电源线、通信线和视频线,连接时要仔细参照安装说明的要求,以确 认通信方式和相应的引脚定义。一般地,设备应在施工后期安装,以避免施工现场的大量粉 尘侵入球机,直接影响其使用效果和寿命。 此外,以下注意事项应予以额外重视: 注意事项一:供电 为保证球机正常工作,供电电源不宜低于球机输入电压的标称值。当标称值为24vac, 电压波动不宜超出±25%。球机常见工作电压为24vac。目前市场上存有220vac型号球机, 其实质将变压器内置于球罩,变压后给球机供电。布线时应强调强、弱电分开,以避免强电 对弱电的干扰。球机内部空间有限,内置变压器使强弱电共处,从而
中型足球机器人电磁铁式踢球机构建模与控制精华文档
独轮机器人侧向通道建模与控制 独轮机器人侧向通道建模与控制
格式:pdf
大小:385KB
页数:未知
4.7
利用拉格朗日建模方法推导出基于惯性飞轮平衡原理的独轮机器人侧向通道动力学方程.在该动力学方程基础上分别设计了pd和lqr两种控制器,并分别进行了仿真和物理实验验证.实验中独轮机器人从侧倾一定角度,在控制的惯性飞轮运动作用下最终回到竖直平衡位置,完成了独轮机器人侧平衡控制目标.仿真和物理实验结果均证明了所建立的动力学方程的正确性和控制器的有效性.
监控球机开发指导
格式:pdf
大小:475KB
页数:31P
4.3
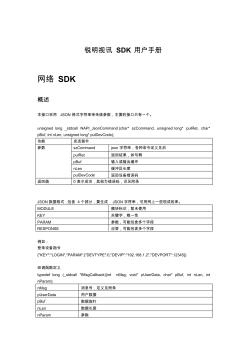
锐明视讯sdk用户手册 网络sdk 概述 本接口采用json格式字符串来传递参数,主要的接口只有一个。 unsignedlong_stdcallnapi_jsoncommand(char*szcommand,unsignedlong*pulret,char* pbuf,intnlen,unsignedlong*puldevcode); 功能发送指令 参数szcommandjson字符串,各种命令定义见后 pulret返回结果,如句柄 pbuf输入或输出缓冲 nlen缓冲区长度 puldevcode返回设备错误码 返回值0表示成功,其他为错误码,详见附录 json数据格式,包含4个部分,要生成json字符串,可用网上一些现成的库。 module模块标识,暂未使用 key关键字,唯一性 param参数,可能包含多个字段
监控系统球机调试
格式:pdf
大小:17KB
页数:1P
4.7
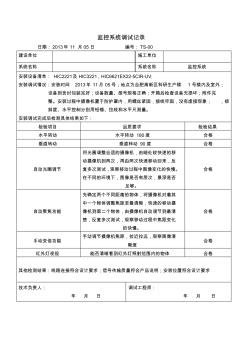
监控系统调试记录 日期:2013年11月05日编号:ts-00 建设单位施工单位 系统名称系统名称监控系统 安装设备清单:hic2221及hic3221,hic6621ex22-5cir-uv; 安装调试情况:安装时间2013年11月05号;地点为合肥高新区科研生产楼1号楼内及室外; 设备到货时包装完好;设备数量、型号规格正确;开箱后检查设备无损坏;附件完 整。安装过程中摄像机置于防护罩内,用螺丝紧固,接线牢固,没有虚接现象;,倾 斜度、水平控制分别用铅锤、拉线和水平尺测量。 安装调试完成后检测具体结果如下: 检验项目品质要求检验结果 水平转动水平转动180度合格 垂直转动垂直转动90度合格 自动光圈调节 将光圈调整合适的摄像机,由暗处较快速的移 动摄像机到两次,再由两次快速移动回来,反 复多次测试,观察移动过程中图像变化的快慢。 在不同的
球形机器人管道式发电装置研究 球形机器人管道式发电装置研究
格式:pdf
大小:200KB
页数:未知
4.8
自发电的南极环境探测机器人的研究越来越多。提出一种能够用于球形机器人的管道式发电装置,针对转速以及磁块布置形式研究了装置中短管道的发电性能,并介绍用于该发电装置的电动势采集系统。数据采集系统分别利用红外对管和单片机对该装置的转速和电动势进行数据监控及采集,并采用无线通信模块进行数据传送。通过adams仿真和实验证实了该装置可以增大用于发电的转速范围,为后续具有续航能力的球形机器人提供了理论基础。
电磁铁
格式:pdf
大小:20KB
页数:5P
4.4
第三节电磁铁电磁继电器 学情分析:电磁继电器在实际应用中虽非常广泛,但学生直接接触的比较少,比 较陌生,可以从图片、视频等入手,使学生对电磁继电器有初步印象,它可以用 于控制电路中,相当于一个开关,只是利用低压控制高压、弱电流控制强电流, 所以电磁继电器使用中大多要用到两种电源:低压控制电源和高压工作电源。再 展示挂图或实物来分析电磁继电器的工作原理,结合实例提出一些实际应用,了 解它是如何控制电路的。 教学目标: (一)知识与技能 1、知道什么是电磁铁。 2、理解电磁铁的特性和工作原理。 3、了解电磁继电器和扬声器的结构和工作原理; (二)过程与方法 1、通过探究电磁铁磁性与什么因素有关的实验,进一步发展学生的空间想 象力。 2、通过对实验的分析,提高学生比较、分析、归纳、结论的能力。 (三)情感、态度与价值观 通过认识电与磁之间的相互联系,使学生乐于探索自然界的奥妙,培
中型足球机器人电磁铁式踢球机构建模与控制最新文档
柔顺关节并联机器人动力学建模与控制研究 柔顺关节并联机器人动力学建模与控制研究
格式:pdf
大小:533KB
页数:未知
4.4
对具有大范围运动特性的柔顺关节并联机器人开展了动力学建模、特性分析、控制策略设计及动态性能分析等研究。基于伪刚体法,研究柔顺关节特性,建立含大变形柔顺关节的系统模型,应用拉格朗日方法建立了系统动力学方程。为补偿柔顺关节引起的系统振动、未建模动态以及惯性参数摄动造成的模型误差,设计趋近律滑模控制策略并证明了其稳定性。仿真结果验证了动力学模型和控制策略的有效性。
回转式成球机结构设计的改进 回转式成球机结构设计的改进
格式:pdf
大小:192KB
页数:3P
4.7
针对传统回转式成球机使用过程中存在的问题,对其结构进行了改进,开发了一种适用性广、操作简单、能耗低、粉尘污染小,且筒体倾角、物料停留时间及喷淋角度等可调的回转式成球机,可满足不同工艺参数操作要求。目前,该设备已在国内某催化剂生产企业使用,效果良好。
电磁铁-王超辉
格式:pdf
大小:54KB
页数:5P
4.5
电磁铁的发展及创新设计 班级:机自11-1bf学号:14114200368姓名:王超辉序号:65 摘要: 电磁铁是通过电产生磁,当在通电螺线管内部插入铁芯后,铁芯被通电螺线管的 磁场磁化。磁化后的铁芯也变成了一个磁体,这样由于两个磁场互相叠加,从而 使螺线管的磁性大大增强。电磁铁是可以通电流来产生磁力的器件,属非永久磁 铁,可以很容易地将其磁性启动或是消除。在日常生产加工中具有广泛的应用, 例如:大型起重机利用电磁铁将废弃车辆抬起。 关键词: 电磁铁原理;技术发展;工艺;发展史;展望;创新设计 一.电磁铁原理 1.圆形线圈通往电流形成的磁场 (1)线圈中心处的磁场方向可将线圈上某一小段导线视为直线,由安培右手定 则判定之。 (2)通有电流的圆形线圈上每一小段电流所产生的磁场,在线圈内都指向同一 方向,故线圈内的磁场较直导线电流产生的磁场强度大。 (3)圆形
电磁铁样本
格式:pdf
大小:6.4MB
页数:48P
4.3
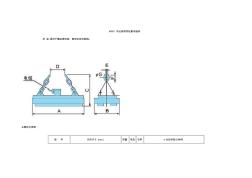
mw5吊运废钢用起重电磁铁 用途:适用于搬运铸铁锭、钢球及各种废钢。 主要技术参数: 型号外形尺寸(mm)质量电流功率4台起吊能力举例 abcdefg (kg)(a)(kw)棒材直径 (mm) 单捆直径 (mm) 长度 (m) 每捆重量 (t) 吊运捆 数 mw12-11590l/g115089080030016090281450327ф16-51ф3009-1223 mw12-14090l/g140087090040016090281700419ф16-51ф3009-1224 mw12-70100l/g700100080030016090281250204.5ф10-32ф3009-122.52 mw12-10090l/g10009
电磁铁简介
格式:pdf
大小:11KB
页数:5P
4.6
一、电磁铁简介 起重电磁铁与各种超重机配合,广泛应用于钢铁公司、船舶制造公司、重型机器制造公司、钢铁 库、港口和铁路等,代替人力吸吊搬运各种铁磁性材料。 起重电磁铁是搬运各种钢铁材料最理想的电磁机械手,它可以使人们从危险、恶劣、繁重的劳动 环境中解放出来。它还适应在高温、水下、粉尘、剧毒、高寒、野外等场合运行,是冶金、运输、机 械制造等行业中必不可少的电气设备。 起重电磁铁控制设备是实现起重电磁铁正常工作的成套控制设备。它可以使起重电磁铁按照指令 进行通电激磁、断电去磁,或强迫励磁以增大起重电磁铁的吸力,或调节其吸力以完成钢板分张卸料 任务,或在电网停电时保持起重电梯铁的吸力以避免钢铁重物下落造成人身伤害与设备损坏。 除标准产品外,我公司可按用户要求设计制造各种非标准产品,欢迎广大用户广为使用,精诚合 作。 二、起重电磁铁使用须知 1、经常检查电磁铁下面非磁性护板的焊缝及各部焊缝。 2
基于场地分区的机器人足球守门员防守策略设计 基于场地分区的机器人足球守门员防守策略设计
格式:pdf
大小:102KB
页数:5P
4.7
通过对场地分区处理,提出了以小球为中心的守门员积极防守策略.在定义守门员3个属性的基础上,设计了小球在球场中不同区域内时守门员的具体防守策略.该策略针对小球运动的各种情况,及时调整守门员在球门区的位置与姿态,实现守门员的高效防守.实际比赛结果证明了所设计的策略是有效的.
喷涂机器人油漆沉积率优化建模与仿真 喷涂机器人油漆沉积率优化建模与仿真
格式:pdf
大小:2.4MB
页数:5P
4.5
油漆沉积率模型是自动编程工艺参数选取的重要依据,为了建立符合实际工况的漆膜模型,采用喷涂机器人喷涂时椭圆型雾锥的实验数据,将贝叶斯归一化神经网络法和遗传算法分别用于漆膜模型的拟合。经过对比分析,采用2种算法得出模型都具有较高的精度,但遗传算法收敛速度更快,并可得出油漆沉积率方程的具体表达式,更适合油漆沉积率建模。
新型除锈爬壁机器人附壁建模与仿真 新型除锈爬壁机器人附壁建模与仿真
格式:pdf
大小:699KB
页数:6P
4.5
设计了1种永磁真空混合附壁的船舶壁面除锈爬壁机器人,该机器人负载大、本体重,机器人的附壁面法向存在水射流反冲力和真空负压压力。建立了机器人下滑和后翻两静态模型,结合船壁面法向的3种受力状态,分别对下滑模型和后翻模型进行了分析,并将两模型永磁单元所需吸附力进行了对比。仿真和实验结果表明,真空负压提高机器人附壁能力明显,可以较大地降低永磁吸附单元所需吸附力,减小机器人负载,较低的真空负压可实现辅助永磁良好附壁,在保证灵活运动的前提下吸附可靠。
电磁铁与磁铁的区别以及结合应用
格式:pdf
大小:61KB
页数:3P
4.4
电磁铁与磁铁的区别以及结合应用 关于怎样样区分磁铁和电磁铁,我置信有很多朋友都有疑问,那接下我们对两者的区别做个简单的分 析。(电磁铁生产厂家---sdl电磁铁) 第一:磁铁 磁铁,就是能够吸附铁类物质的磁石,可以长时间无间隙的吸附,需求一定的力气才干够将铁类物质 与磁铁分别。磁铁的材质分为很多种,常见的为钕铁硼,铁氧体,铝镍钴,钐钴,铁碳钴等。其中钕铁硼 的磁性最强,称为强磁铁,普通需求很强力的吸附才干都会优先选择钕铁硼。(电磁铁生产厂家---sdl 电磁铁) 第二:电磁铁 内部带有铁芯的、应用通有电流的线圈使其像磁铁一样具有磁性的装置叫做电磁铁。通常制成条形或 蹄形。铁芯要用容易磁化,又容易消逝磁性的软铁或硅钢来制做。这样的电磁铁在通电时有磁性,断电后 就随之消逝。(电磁铁厂家) 当在通电螺线管内部插入铁芯后,铁芯被通电螺线管的磁场磁化。磁化后的铁芯也变成了一个磁体, 这样由
中型足球机器人电磁铁式踢球机构建模与控制相关
文辑推荐
知识推荐
百科推荐

职位:水利水电工程师主管
擅长专业:土建 安装 装饰 市政 园林


