

基于静态平衡的四足机器人斜面步态规划
格式:pdf
大小:868KB
页数:3P
人气 :52
 4.6
4.6
本研究从静态平衡角度出发,考虑了影响斜面步行稳定性的各种因素,提出了采用SM和SNE共同判稳的方法。基于这两个指标,针对四足机器人在斜面步行中的倾倒和绕支撑腿连线翻转的问题,规划了一种快速、稳定的全方位静步态,通过计算机仿真平台进行验证,实验表明了所研究方法的可行性和有效性。



 双足机器人上楼梯步态的规划与控制
双足机器人上楼梯步态的规划与控制 双足机器人上楼梯步态的规划与控制
研究双足机器人上楼路径优化技术,为了让双足机器人实现稳定的上楼梯的行走,应规划双足机器人的上楼梯的步态。为解决对步态进行合理规划与稳定控制问题,提出用几何约束法,用摆线拟合踝关节运动轨迹,设计模糊控制器,对踝关节的滚转角度进行调整,使zmp位置靠近支撑区域中心,保证了机器人的稳定行走;最后在adams软件中建立了双足机器人的虚拟样机,并通过与matlab的联合仿真,实现了双足机器人上楼梯的稳定行走仿真。仿真结果验证了上楼梯步态与模糊控制器的有效性,为系统设计提供了保证。
不平整地面上双足机器人的步态控制 不平整地面上双足机器人的步态控制
提出了一种不平地面环境下双足机器人的步行控制算法.该算法由步态规划和传感器反馈控制系统组成.在步态规划中,采用被动倒立摆模型设计双足机器人的质心位置,所生成的步态使机器人能够在平地上更自然有效地稳定行走.在线反馈控制系统用于处理地面环境的凹凸不平以及来自外界的未知扰动,可分为上身姿态控制、期望zmp控制以及非线性落地控制3个部分.这3种控制分别针对不同的控制目标,并根据步行过程的具体阶段在线修正预先规划好的步态,维持双足机器人的步行稳定性.它们在结构上相互耦合,从而实现加速在线反馈控制系统的收敛速度、克服机器人柔性对控制作用的负面影响等效果.双足机器人在凹凸地面的步行实验验证了所提出步行控制算法的有效性.
编辑推荐下载
电力铁塔攀爬机器人的步态分析 电力铁塔攀爬机器人的步态分析
格式:pdf
大小:967KB
页数:6P
4.5
为了提高电力系统的自动化水平,减轻电力工人在检修高压输电系统时的劳动强度,同时保障其人身安全,提出并设计了一种可以攀爬电力铁塔的5自由度关节式机器人,给出了机器人的cad模型,分析了其在铁塔两种位置攀爬过渡的能力.根据机器人机构特征,提出、分析和比较了蠕虫式和扭转式攀爬步态.蠕虫式攀爬步态即机器人本体的两连杆之间角度周期变化,两爪交替前进;扭转式攀爬步态即机器人本体不动,爪部回转关节旋转180°使得机器人整体扭转半周.在机械系统动力学仿真软件adams环境下,对机器人采用这两种步态在铁塔主材表面、横担侧面和上表面3种方位攀爬情况进行了仿真,计算和分析了不同情况下机器人各关节转矩和系统能耗,得出最适合铁塔各种方位的攀爬步态:在横担上攀爬时应采用能耗较小的扭转式步态,但是在主材表面攀爬时两种步态能耗接近,需考虑障碍类型选取合适的步态.仿真结果为机器人的攀爬步态规划及控制策略提供了依据,同时样机试验结果也验证了两种攀爬步态的可行性.

静态平衡四足机器人斜面步态规划热门文档


abb机器人仿真步骤
格式:pdf
大小:2.6MB
页数:12P
4.4
作图步骤: 1、双击桌面robotstudio5.15图标,如下图所示。 点击左侧选项栏,选择授权。 然后选择激活向导,选择如下: 2、点击创建文件,出现如下界面。 3、选择机器人模型,点击abb模型库,出现如下界面,选择irb2600.把承重能力改为20kg. 4、然后点击导入模型库,下拖选择mytool后,然后把左侧边mytool工具拖到 irb2600-20-165-01,机器人上自动安装了喷头工具。 5、然后点击机器人系统菜单,选择从布局创建系统。 在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。在主菜单中,一定要 修改工具,把原始的tool10改为mytool。或者,在放入机器人时,即完成此项设置,可以 不需要修改此项。 一直选择下一个,即可成功。 成功后,屏幕右下角变为绿色。 5、选择建模,在菜单中选择固体,再选择矩形体。
六足机器人模块化结构设计 六足机器人模块化结构设计
格式:pdf
大小:813KB
页数:4P
4.7
为实现性能优越而结构简单的六足移动设想,通过对六足机器人进行步态和传动结构特征的分析,提出了六足机器人模块化结构设计方案,并利用solidworks完成了各模块及机器人的整体构型。最后,对其结构特征进行了分析,论证了该六足机器人的特性和优势。研究结果表明,该模块化结构设计方案有助于推动六足机器人的广泛应用。

6关节机器人技术论文
格式:pdf
大小:33KB
页数:3P
4.7
1 1、工业领域中一般多用6关节型机器人,根据所学内容谈谈 该种机器人都有哪些部件组成,每个部件的工作原理及选择 该部件的依据(800字以上) 目前各大工业机器人厂商提供的六轴关节机器人结构从外观上看大同小异,相差不大,从本 质上来说,其结构应该都是一致的,即其第一关节旋转轴(基座旋转轴)、第四关节旋转轴、 第六关节旋转轴(手腕端部法兰安装盘的旋转中心)在同一个平面内;第二关节旋转轴、第 三关节旋转轴以及第五关节旋转轴互相平行,而且与前面提到到平面垂直;另外,还需要保 证第四关节旋转轴线、第五关节旋转轴线以及第六关节旋转轴线相交于一点。采用该种结构 的工业机器人可以使得其运动学算法最为简单可靠。设计的机器人要保证高的定位精度,就 必须尽可能的满足上述条件,通过机械加工及装配精度来保证最终的机器人运行精度控制在 一定范围内。如果机器人的结构与此差别较大的话

机器人实验报告
格式:pdf
大小:457KB
页数:6P
4.5
1 机 器 人 实 验 报 告 册 制作人:叶翔徐培嘉陈琳 制作日期:2012年12月 2 目录 1、中国机器人大赛双足竞步机器人比赛规则简述............3 2、双足竞步机器人构成简介.......................3 3、功能及其改进方案简介.........................4 4、设计与制作软件简介...........................4 5、比赛功能简介.................................5 6、制作心得体会.................................6 3 一、中国机器人大赛双足竞步机器人比赛规则简述 1、交叉足印竞步机器人: 结构只有双足、并只能以走路的方式来移动,机器人要分清楚正面及背面, 以箭头方向作为正面,是自主式脱线控制,用
静态平衡四足机器人斜面步态规划精华文档
iPad专用机器人支架诞生 iPad专用机器人支架诞生
格式:pdf
大小:289KB
页数:1P
4.6
美国创业公司doublerobotics开发了一款名为double的机器人。它由一部ipad、一个支架和电动两轮底座组成,支持远程操纵,能实现前进、转弯等动作,可以在公司或家里使用。它能伸展至5英尺高,或折叠至5.6英尺,从而模拟操纵者的站姿或坐姿。doubletelepresencerobot目前售价1999美元,折合人民币约12477元,对于那种公事繁忙,又抽不出身去参加各种会议的大佬们来说,这个东西真的是个不错的贴心宝贝。
灭火机器人
格式:pdf
大小:27KB
页数:4P
4.3
灭火机器人 机器人这个概念早已家喻户晓,它是自动执行工作的机器装置,可以协助或者取代人类从 事多种工作。由机器人来代替人类在危险的工作环境中工作,尤其是特殊紧急险情等危害公 共安全时,机器人发挥着越来越重要的作用。本文仅就消防机器人在国内外的发展现状做简 要介绍,并对消防机器人在实际中的应用及改进方向做较为详尽的阐述,供广大同仁参考。 “机器人”一词问世以来,一直成为高科技高尖端的代名词。世界发达国家均在机器人 的研发上投入大量的人力财力。机器人是自动执行工作的机器装置,可以协助或者取代人类 从事多种工作。近年来,机器人已经在很多国家的多个行业逐步代替了手工,是人力资源匮乏 国家解决劳动力问题的上佳选择。而由机器人来代替人类在危险的工作环境中工作,尤其是 危害公共安全的火灾、毒气、爆炸等特殊紧急险情时,机器人发挥着越来越重要的作用。消 防事业直接服务于经济建设,高
l六足昆虫机器人机械原理
格式:pdf
大小:539KB
页数:5P
4.4
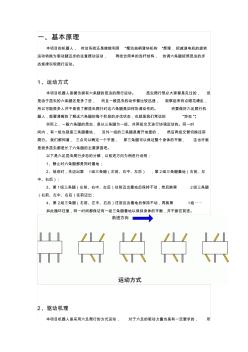
一、基本原理 本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。昆虫爬行想必大家都是见过的,但 是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前 爬行。我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这
静态平衡四足机器人斜面步态规划最新文档

静态平衡阀
格式:pdf
大小:238KB
页数:9P
4.5
静态平衡阀 静态平衡阀 静态平衡阀亦称平衡阀、手动平衡阀、数字锁定平衡阀、双位调节阀等,它是通 过改变阀芯与阀座的间隙静态平衡阀(开度),来改变流经阀门的流动阻力以达 到调节流量的目的,其作用对象是系统的阻力,静态平衡阀能够将新的水量按照 设计计算的比例平衡分配,各支路同时按比例增减,仍然满足当前气候需要下的 部份负荷的流量需求,起到热平衡的作用。 目录 静态平衡阀原理介绍 静态平衡阀的性能及特点 工作原理 应用 选型: 主要特点: 静态平衡阀的应用分析 静态平衡阀原理介绍 静态平衡阀是一种具有数字锁定特殊功能的调节型阀门,采用直流型 阀体结构,具有更好的等百分比流量特性,能够合理地分配流量,有效地 解决供热(空调)系统中存在的室温冷热不均问题。同时能准确地调节压 降和流量,用以改善管网系统中液体流动状态,达到管网液体平衡和节约 源的目的。阀门设有开启度指示、开度锁定装置及用于流
静态平衡阀要求
格式:pdf
大小:46KB
页数:2P
4.6
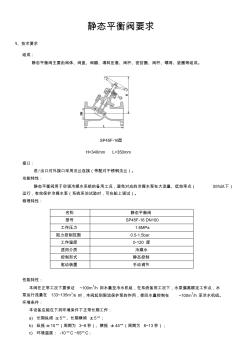
静态平衡阀要求 1、技术要求 组成: 静态平衡阀主要由阀体、阀盖、阀瓣、填料压套、阀杆、密封圈、阀杆、螺母、垫圈等组成。 sp45f-16型 h=340mml=350mm 接口: 进/出口对外接口采用法兰连接(带配对不锈钢法兰)。 功能特性: 静态平衡阀用于空调冷媒水系统的备用工况,避免对应的冷媒水泵在大流量、低效率点(55%以下) 运行,有效保护冷媒水泵(系统系泊试验时,可在船上调试)。 物理特性: 名称静态平衡阀 型号sp45f-16dn100 工作压力1.6mpa 阻力控制范围0.5-1.5bar 工作温度0-120度 适用介质冷媒水 控制形式静态控制 驱动装置手动调节 性能特性: 本阀在正常工况下要保证~100m3/h回水量至冷水机组,在系统备用工况下,水泵偏离额定工作点,水 泵运行流量在133~135m3/h时,本阀起到限流保护泵的作用,
用AVR单片机实现步行机器人的设计 用AVR单片机实现步行机器人的设计
格式:pdf
大小:443KB
页数:3P
4.6
双足步行机器人融合仿生学、复杂动力学建模、多传感器融合以及控制工程学科等多种学科,可以为控制理论应用、动力学问题的研究提供理想的实验平台。本论文主要涉及到双足步行机器人的自由度配置、本体结构、单片机的功能、程序设计的基本思路等方面问题的研究。

静态平衡阀
格式:pdf
大小:1.7MB
页数:5P
4.5
静态平衡阀 目录 流量静态平衡阀 平衡阀>>静态平衡阀>>静态流量平衡阀 产品名称:静态流量平衡阀 产品型号:sp45f 产品口径:dn15-350 产品压力:0.6-6.4mpa 产品材质:铸钢、不锈钢、合金钢等 产品概括: 生产标准:国家标准gb、机械标准jb、化工标准hg、美标 api、ansi、德标din、日本jis、jpi、英标bs生产。阀体 材质:铜、铸铁、铸钢、碳钢、wcb、wc6、wc9、20#、25#、 锻钢、a105、f11、f22、不锈钢、304、304l、316、316l、 铬钼钢、低温钢、钛合金钢等。工作压力1.0mpa-50.0mpa。工 作温度:-196℃-650℃。连接方式:内螺纹、外螺纹、法兰、 焊接、对焊、承插焊、卡套、卡箍。驱动方式:手动、气动、 液动、电动。 产品详细信息 静态流量平衡阀概述: sp45f
 旋转足式机器人步态控制器设计
旋转足式机器人步态控制器设计 旋转足式机器人步态控制器设计
格式:pdf
大小:262KB
页数:未知
4.4
为实现旋转足式机器人的步态控制,本文提供了基于freescalek60的一种相对易行的控制器设计方案。介绍了控制器任务调度方案、基本模块设计、步态算法设计,以及通讯方案。
双足步行机器人教师的设计与研究 双足步行机器人教师的设计与研究
格式:pdf
大小:283KB
页数:未知
4.7
分析了步行运动的状态,确定了双足步行机器人自由度的分配,在比较各种驱动装置优缺点的基础上,选择了精度高、维修简单且易于程序控制和集中控制的舵机作为驱动器。根据特定的结构特征,构建了双足步行机器人的基本框架,并利用三维建模软件unigraphics建立了双足步行机器人的实体模型。
工业机器人弹簧式平衡缸的参数研究 工业机器人弹簧式平衡缸的参数研究
格式:pdf
大小:277KB
页数:未知
4.3
工业机器人弹簧式平衡缸是用于平衡重力对机器人ⅱ轴所产生的力矩,平衡缸参数的配置直接影响到对偏重力矩的平衡效果,以及机器人的运动学、动力学特性。因此,对弹簧式平衡缸关键参数的分析研究至关重要。通过对弹簧式平衡缸关键参数的深入研究,获得了关键参数值的大小对平衡效果的影响方式,以一个原有成型的数据进行分析研究,获得了更为合理的参数值,为弹簧式平衡缸的设计提供了理论依据。
学龄肥胖儿童单足静态平衡能力的研究 学龄肥胖儿童单足静态平衡能力的研究
格式:pdf
大小:28KB
页数:2P
4.5
平衡能力涉及到各类群体中,近年来国内学者主要以老年人的平衡能力研究为主。这一研究热点主要是基于对老年人跌倒风险的评估。平衡能力的研究已经成为当前学术界最为活跃的研究领域。根据实验组受试者年龄、形态学指标筛选出30名受试者,其中15名为学龄肥胖儿童,采用win-pod平衡功能检测系统对受试者进行单足和双足平衡能力测试。通过测试学龄肥胖儿童与正常儿童的平衡能力,来对肥胖儿童静态平衡能力进行评估,归纳出学龄肥胖儿童静态平衡能力的特征。
双电机驱动的六足直立式步行机器人的设计 双电机驱动的六足直立式步行机器人的设计
格式:pdf
大小:521KB
页数:未知
4.8
采用直立式腿部结构,以双电机为驱动力而设计开发了一种可调头拐弯的六足步行机器人;行走机构采用曲柄连杆机构为传动系统,能够实现前行、后退、左拐、右拐、原地调头或停止等动作.其简单巧妙的机械机构设计、动力传动方案和控制系统,为将来更完善的六足机器人设计、开发、不断拓展和深入研究提供了科学的依据.
静态平衡四足机器人斜面步态规划相关
文辑推荐
知识推荐
百科推荐

职位:信息系统监理工程师
擅长专业:土建 安装 装饰 市政 园林


