

H型钢梁翼缘感应电动势随应力变化实验研究
格式:pdf
大小:350KB
页数:5P
人气 :54
 4.3
4.3
目的探索钢梁在役应力的电磁学测试方法及原理.方法将带有交流线圈的磁芯传感器置于翼缘表面,形成闭合磁路.在钢梁跨中施加集中力的同时,测量1/2和1/3跨径位置感应电动势E和应变ε.结果实验表明:钢梁上翼缘感应电动势随压应力增大而减小,并服从线性规律;下翼缘感应电动势随拉应力增大呈现增幅递减的上升趋势,由二次幂函数表达其变化特征;上下翼缘应力与应变关系均为直线.结论钢梁铁磁材料在翼缘拉伸与压缩两种不同状态下,磁矩偏转对感应电动势变化的影响具有不对称性.




线圈中的感应电动势
1 word线圈中的感应电动势 2 线圈中的感应电动势 一、教学目的: 1.理解且掌握线圈中产生感应电动势的条件; 2.理解掌握楞次定律,且会用其判断电动势的方向; 3.理解掌握法拉第电磁感应定律,且会应用。 二、教学重点: 线圈中产生感应电动势的条件。 三、教学难点: 应用楞次定律判断感应电动势的方向。 四、教具或挂图: 条形磁铁检流计连接导线线圈挂图 五、授课方法: 采用做实验来观察、分析的方法得出结论。 六、课时安排: 两课时 七、教学过程 (一)复习提问: 1.直导线切割磁力线能产生感应电动势? 2.产生感应电动势的大小怎样计算?方向怎样判断? (二)导语: 直导线切割磁力线运动能产生感应电动势,那么,线圈中磁通变化能否产生感应电动势?咱 们通过实验来观察一下。 (三)讲授新课: 线圈中的感应电动势 一、感应电动势产生的条件: 1.让学生8人一组,共分8组
编辑推荐下载
 箱型柱-H型钢梁节点断裂机理及梁翼缘扩大头和长槽孔节点研究
箱型柱-H型钢梁节点断裂机理及梁翼缘扩大头和长槽孔节点研究 箱型柱-H型钢梁节点断裂机理及梁翼缘扩大头和长槽孔节点研究
格式:pdf
大小:507KB
页数:未知
4.4
对箱型柱-h型钢梁常规节点进行了低周往复循环加载试验和基于椭球面断裂模型及耦联的椭球面屈服模型的数值模拟和断裂分析。结果显示:箱型柱对梁的强约束,使梁翼缘对接焊缝应力集中严重,裂纹起始于几何突变剧烈的对接焊缝侧边。箱型柱-h型钢梁常规节点呈脆性断裂,节点塑性转角达不到临时指南fema要求的0.03rad。以考虑焊接缺陷和焊接残余应力的结构钢椭球面断裂模型为判据,提出了梁翼缘扩大头和长槽孔箱型柱-h型钢梁节点构造,进行了低周往复循环加载试验和数值分析。结果表明:扩大头构造显著减缓了对接焊缝侧边的应力集中程度,长槽孔促使箱型柱-h型钢梁节点在梁削弱截面形成塑性铰。当对接焊缝扩大头和梁翼缘长槽孔构造参数适当时,箱型柱-h型钢梁节点的塑性转角可达到fema要求的0.03rad,承载力和常规节点相当。
H型钢梁翼缘感应电动势随应力变化实验研究热门文档
通电金属管线的感应电动势及其电磁勘探定位 通电金属管线的感应电动势及其电磁勘探定位
格式:pdf
大小:92KB
页数:5P
4.6
通过对通电金属导线在探测线圈中感应电动势的讨论,以感应法测量磁场为基础,揭示一种勘探地表以下金属管线的方位和深度的电磁方法。

5.金属杆转动产生的感应电动势
格式:pdf
大小:49KB
页数:2P
4.4
金属杆转动产生的感应电动势 导体上的各点切割速度不相同,但可用各点速度的平均值代入 e=bl??平求感应电动势。 v0=0,v末=ωl ??平= v0+v末 ?? =ωl ?? ??=??????平= ?? ?? ??????? 典例.如图所示,垂直纸面向外的匀强磁场的磁感应强度为b,在垂直于磁场方向的平面内,有 一个长度为l的金属棒op绕垂直于纸面的转动轴o沿逆时针方向以角速度ω匀速转动, 试求金属棒op转动时所产生的感应电动势的大小和方向. 图15 解析运用公式e=blv计算,金属棒op切割磁感线时,棒上各点线速度大小不同,从线 速度与角速度的关系v=ωr可看出,各点的线速度与转动半径成正比,因而,其平均切割 速度为v= vo+vp 2= ωl 2,故e=blv= 1 2bl 2ω,方
圆弧扩大头和梁翼缘圆孔削弱型箱型中柱-H型钢梁节点循环加载试验研究 圆弧扩大头和梁翼缘圆孔削弱型箱型中柱-H型钢梁节点循环加载试验研究
格式:pdf
大小:454KB
页数:未知
4.5
对1个隔板贯通式箱型中柱-h型钢梁常规节点和3个圆弧扩大头及梁翼缘圆孔削弱型节点进行了低周往复循环加载试验.试验结果表明,常规节点在梁翼缘对接焊缝处脆断,节点塑性转角约为0.016rad;圆弧扩大头及圆孔削弱型节点在梁翼缘圆孔削弱处断裂,裂纹起始于圆孔侧边,塑性转角较常规节点提高约19%,承载力较常规节点降低5.5%~9.4%,滞回曲线的包络面积(耗能性能)较常规节点约提高0.2%~9.0%.圆弧扩大头构造降低了梁翼缘对接焊缝的应力集中程度,避免了对接焊缝过早脆断;圆孔削弱构造促使梁削弱截面形成塑性铰.
翼缘开洞H型钢梁的强度研究及其加固措施 翼缘开洞H型钢梁的强度研究及其加固措施
格式:pdf
大小:166KB
页数:未知
4.8
针对实际工程中存在的钢梁翼缘开洞问题展开研究,通过有限元分析的方法系统研究了钢梁翼缘开洞位置处的截面强度,考虑开洞位置、开洞个数对钢梁强度的影响,并给出了实用的补强加固措施,以期指导实践。
T梁翼缘板外露钢筋控制技术研究 T梁翼缘板外露钢筋控制技术研究
格式:pdf
大小:116KB
页数:未知
4.6
预制t梁翼缘板钢筋防止上浮装置可以有效的控制翼缘板钢筋的外露长度,同时可以有效的控制翼缘板上下保护层的厚度。该方法操作简单,成本较低,同时减少了工人在施工过程中对每道翼缘板钢筋间距及外露钢筋长度的定位,避免了繁琐的工序,又可以很好的保证t梁翼缘板施工质量。
H型钢梁翼缘感应电动势随应力变化实验研究精华文档
 砼T梁翼缘板防撞分析
砼T梁翼缘板防撞分析 砼T梁翼缘板防撞分析
格式:pdf
大小:407KB
页数:2P
4.7
结合某30m砼t梁通用图的设计,利用空间有限元软件对t梁翼缘板的防撞能力进行了分析,并与规范规定的方法进行了对比,提出了保证t形梁翼缘板防撞能力的措施。
无加劲冷成型方钢管-H形钢梁翼缘板焊接节点受拉性能试验研究 无加劲冷成型方钢管-H形钢梁翼缘板焊接节点受拉性能试验研究
格式:pdf
大小:1.0MB
页数:8P
4.3
为研究无加劲方钢管柱-h形钢梁节点的特性,对梁翼缘板与柱段焊接组成的节点进行试验研究,分析截面形成方式、钢管成型焊缝位置、与平面受力正交方向上的梁翼缘板约束作用、梁翼缘板端部构造形式以及钢管与梁翼缘板几何参数对连接的力学性能的影响。试验设了3组11个试件,得到单调拉伸荷载作用下各试件的开裂荷载、极限荷载与各部分变形等力学指标。试验研究表明:冷成型钢管承载力和初始刚度较焊接组合截面试件有所提高;钢管成型焊缝的位置对节点受拉承载力及初始刚度没有影响;正交方向梁翼缘板的约束对节点初始刚度略有提高作用;梁翼缘板加宽的连接方式可以提高梁翼缘板的平均应力;影响节点受力性能的主要因素有钢管截面的宽厚比、梁翼缘板与钢管的宽度比和厚度比。
预应力混凝土T梁翼缘板裂缝分析及对策 预应力混凝土T梁翼缘板裂缝分析及对策
格式:pdf
大小:114KB
页数:1P
4.6
社会经济的快速发展,加快了我国道路桥梁的建设,然而,近年来道路桥梁工程质量也提出了更高的要求,预应力混凝土t梁具有结构简单、受力明确等优点,在工程中应用较为广泛,本文结合某工程出现的裂缝进行分析,首先就混凝土裂缝产生的原因、机理做简单的概述,其次,详细的分析了翼缘板裂缝的治理措施和预防措施,希望通过本文能够给相关工作人员带来帮助。
无加劲冷成型方钢管-H形钢梁翼缘板焊接节点管壁变形初始刚度分析 无加劲冷成型方钢管-H形钢梁翼缘板焊接节点管壁变形初始刚度分析
格式:pdf
大小:758KB
页数:7P
4.4
对于无加劲方钢管柱-h形钢梁节点,在h形梁端部弯矩作用下方钢管柱壁变形是节点变形的主要组成部分。为考察无加劲方钢管柱-h形钢梁连接节点的管壁变形特性,在11个试件试验研究基础上,依据单调拉伸荷载作用得到各个试件的管壁变形值。基于经典弹性板壳理论推导管壁变形解答,得到管壁变形的解析表达式,并以此计算管壁变形刚度。通过管壁变形刚度的试验值、拟合式计算值以及理论解答值的比较,验证了利用板壳理论推导解析解答方法的可行性。研究结果表明:影响管壁变形刚度的主要因素是钢管管壁宽厚比;由于冷成型钢管截面存在弯角,管壁计算宽厚比变小,冷成型钢管柱管壁变形刚度较焊接组合截面柱明显提高。
H型钢梁翼缘感应电动势随应力变化实验研究最新文档
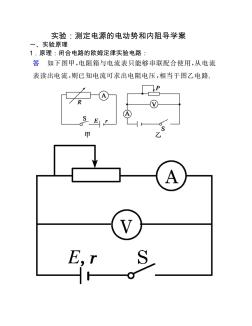
实验:测定电源的电动势和内阻导学案
格式:pdf
大小:454KB
页数:6P
4.4
实验:测定电源的电动势和内阻导学案 一、实验原理 1.原理:闭合电路的欧姆定律实验电路: 2、实验电路 分析两电路的不同,左图中由于电压表分流而引起误差,右图 由电流表分流引起误差。而在右图中实际上测到的内阻等效于 电流表与电源串联起来的总阻值,但由于电流表内阻较小,与 电源内阻接近,故相对误差很大;而左图电压 表内阻很大,其分流作用可忽略不计,误差较小。因而,实验 电路我们选择的是左图。 3.实验依据: 得,解得 二、实验操作 【例】测定电源的电动势和内电阻的实验电路如下图,回答下 列问题: (1)现备有以下器材: a.干电池1个 b.电压表(0~3v)c.电压表(0~15v) d.电流表(0~0.6a)e.电流表(0~3a) f.滑动变阻器(0~10ω)g.滑动变阻器(0~1750ω) 其中电压表应选,电流表应选,滑动变阻

感应电动机 (2)
格式:pdf
大小:765KB
页数:18P
4.8
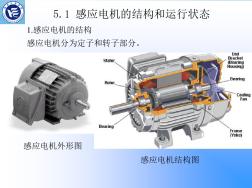
现代运动控制系统作业 郝瑞超 2620170055 第一次作业 1,试简述感应电机的工作原理,公式推导证明旋转磁动势的产生 感应电机工作原理; 答;当电机定子三相绕组通入三相正弦对称电流,电流会产生一幅值恒定的 旋转磁场,旋转磁场切割转子导体使转子回路产生感应电流,感应电流在磁 场中受到安培力,从而使转子在安培力作用下开始旋转,随后定转子维持一 定的转差率,从而使转子因切割磁场产生的感应电流维持,进而使受到的安 培力维持一定的电磁转矩,并与负载转矩平衡而使转速得以维持。 旋转磁动势的产生,设定子通入三相电流为 设定a轴角度为,则定子产生磁势基波分量为 其中,为定子绕组匝数,从而合成磁势的基波分量为; 由上式可知,合成磁势最大值点随时间变化,由三角函数的周期性知合成 磁势为旋转磁动势,其旋转速度取决于输入三相电流频率。 2,写出感应电机动态数学模型基本型的基本方程,并结合
 某客专特大桥钢混结合梁翼缘板现浇角钢支架检算
某客专特大桥钢混结合梁翼缘板现浇角钢支架检算 某客专特大桥钢混结合梁翼缘板现浇角钢支架检算
格式:pdf
大小:298KB
页数:2P
4.5
在桥梁跨越地物的施工条件受到严格限制或者桥梁跨度为非标准跨度时,采用简支钢混结合梁进行调跨。对某客专特大桥钢混结合梁上翼缘板现浇角钢支架进行强度、刚度及稳定性检算的结果显示,角钢支架力学性能符合规范要求。为今后类似条件的施工临时结构检算提供参考。
感应电动机伺服驱动系统自适应控制系统研究 感应电动机伺服驱动系统自适应控制系统研究
格式:pdf
大小:111KB
页数:2P
4.5
本文针对性的提出了基于递归型小波神经网络的自适应控制性能的方案,该算法计算量减少,简化了控制结构,它可随着伺服驱动系统的运行情况的改变控制系统的结构参数,提高了伺服驱动系统对参数变化的性能,同时,也较好地改善了伺服驱动控制系统的稳态性能。通过仿真的结果验证了该控制系统方案的有效性和可行性。
感应电机.
格式:pdf
大小:78KB
页数:10P
4.6
1 第五章感应电机 一、填空 1.如果感应电机运行时转差率为s,则电磁功率,机械功率和转子铜耗之间的比例是 2:p:ecupp=。 2.★当三相感应电动机定子绕组接于hz50的电源上作电动机运行时,定子电流的频率 为,定子绕组感应电势的频率为,如转差率为s,此时转子绕组感 应电势的频率,转子电流的频率为。 3.三相感应电动机,如使起动转矩到达最大,此时ms=,转子总电阻值约为 。 4.★感应电动机起动时,转差率s,此时转子电流2i的值, 2cos,主磁通比,正常运行时要,因此起动转 矩。 5.★一台三相八极感应电动机的电网频率hz50,空载运行时转速为735转/分,此时转 差率为,转子电势的频率为。当转差率为0.04时,转子的转速 为,转子的电势频率为。 6.三相
感应电机例题(1)
格式:pdf
大小:97KB
页数:4P
4.4
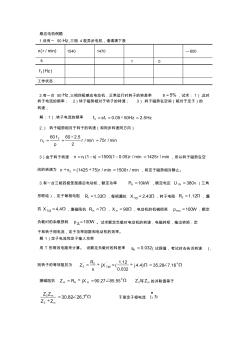
感应电机例题 1.设有一50hz,三相4极异步电机,请填满下表 (/min)nr15401470—600 s10 2()fhz 工作状态 2.有一台50hz,三相四极感应电动机,正常运行时转子的转差率5%s,试求:1).此时 转子电流的频率;2)转子磁势相对于转子的转速;3).转子磁势在空间(相对于定子)的 转速; 解:1).转子电流的频率210.05502.5fsfhzhz 2.)转子磁势相对于转子的转速(和同步转速同方向) 2 2 60602.5 /min75/min 2 f nrr p 3)由于转子转速1(1)1500(10.05)/min1425/minnnsrr,所以转子磁势在空 间的转速为2(142575)/min1500/minnnrr
H型钢梁翼缘感应电动势随应力变化实验研究相关
文辑推荐
知识推荐
百科推荐


职位:装配式BIM工程师
擅长专业:土建 安装 装饰 市政 园林


