

基于计算机仿真技术的新型半主动悬架建模及动力学分析
格式:pdf
大小:720KB
页数:5P
人气 :89
 4.4
4.4
运用EASY5建立了EHA模型,运用机械系统分析软件ADAMS建立了半主动悬架的机械系统模型,运用MATLAB建立了基于模糊算法的控制模型,通过各软件之间的数据接口实现整车联合建模和协同仿真.结果表明:基于EHA的半主动悬架能够很好地降低车辆的垂直振动,提高车辆行驶的平顺性;多软件的协同仿真技术在研究半主动悬架的控制技术上是可行的,为机电液一体的复杂系统的建模和仿真提供了新的思路.




 基于ANSYS的钢结构塔架动力学分析
基于ANSYS的钢结构塔架动力学分析 基于ANSYS的钢结构塔架动力学分析
利用有限元分析软件ansys建立煤矿快速定量装车站钢结构塔架的模型,分别针对空载和满载工况输入3种不同的地震波作用,采用有限元分析软件ansys对塔架进行动力学分析,探讨结构在地震作用下的动力反应特点和一般规律。
编辑推荐下载

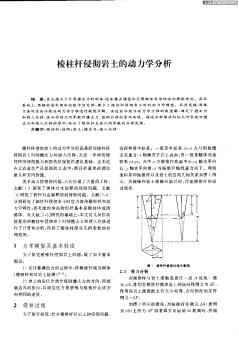
棱柱杆侵彻岩土的动力学分析
格式:pdf
大小:203KB
页数:3P
3
棱柱杆侵彻岩土的动力学分析——首先建立了计算撞击力的刚体一流体撞击模型和计算靶体变形的法向膨胀理论。在此基础上,根据动量定理和功能守恒定律,建立了棱柱杆侵彻岩土时的动力学模型。采用龙格一库塔方法对这些非线性动力学方程进行数值求解。由这些非线性...
基于计算机仿真技术新型半主动悬架建模及动力学分析热门文档
集装箱船结构动力学分析 集装箱船结构动力学分析
格式:pdf
大小:620KB
页数:3P
4.5
以某3100teu巴拿马型集装箱船为例,建立集装箱船体全船结构三维有限元动力学分析的计算模型,对船体结构进行实特征值、有阻尼瞬态响应的计算分析;采用lanczos方法计算特征值;采用模态方法进行瞬态响应分析。分析结果表明,该船在运营过程中容易出现扭转振动,需要对驾驶甲板的侧翼结构进行修改设计,但其振动强度在总体上是可以接受的。
挖掘机载机整机挖掘力刚体动力学分析 挖掘机载机整机挖掘力刚体动力学分析
格式:pdf
大小:689KB
页数:6P
4.5
以轮式wz30-25型液压挖掘装载机为实例,基于多刚体系统动力学理论,在三组反铲机构液压缸的运动作用下,研究了挖掘装载机整机系统在铲斗斗齿切向产生的挖掘力响应。在斗杆液压缸挖掘和铲斗液压缸挖掘两种工况下,进行了挖掘力响应分析。在各工况下,影响挖掘力的重要参数有很多,包括液压系统的压力、液压缸的尺寸、各液压缸间的相互作用力、整机稳定性和地面附着性能。将推导这些因素和最大挖掘力之间的函数关系。
某防爆车半主动座椅悬架的天棚控制动力学研究 某防爆车半主动座椅悬架的天棚控制动力学研究
格式:pdf
大小:158KB
页数:未知
4.4
为更好地提高某防爆车座椅的平稳性,对比研究了线性被动悬架、天棚控制下的半主动悬架的动力学性能。在建立2种悬架的动力学模型和天棚控制系统的基础上,利用adams与matlab/simulink联合仿真,获得座椅的库仑阻尼力(fr)时域响应曲线、悬架系统的单位阶跃时域响应曲线、座椅相对于车身的相对位移时域响应曲线。对比结果表明:相对于线性被动悬架系统,天棚控制下的悬架系统在振幅上有了很大的改善,悬架处于稳定状态时被拉伸的长度减小,大大提高了整个悬架的平顺性;同时,整个系统的超调量也减小,调节时间相应地缩短了一些,并增加了整个悬架系统的稳定性。
基于演化博弈的WSNs攻防策略选择动力学分析 基于演化博弈的WSNs攻防策略选择动力学分析
格式:pdf
大小:1.4MB
页数:6P
4.5
针对无线传感器网络(wsns)容易被恶意攻击的问题,引入奖励因子与惩罚因子,提出一种wsns防御系统与恶意节点的博弈模型。通过对模型的量化分析,计算出博弈双方的收益函数,根据复制动态原理,进行演化动力学分析。给出博弈双方的演化稳定策略,揭示攻防双方策略选择的规律,为wsns防御机制设计提供理论参考。数值实验验证了演化稳定策略命题的正确性和奖励因子、惩罚因子的有效性。
基于ADAMS的蜗轮蜗杆刚柔耦合动力学分析 基于ADAMS的蜗轮蜗杆刚柔耦合动力学分析
格式:pdf
大小:431KB
页数:未知
4.7
针对需要考虑构件变形的特殊情况,完全把模型当做刚性体系统来处理则不能达到精度要求,还必须把模型的部分构件做成可以产生变形的柔性体来处理,以模仿其真实情况,这对提高系统的精度,寻找应力集中位置,提高机械的可靠性具有重大意义。结合机械动力学分析软件adams和有限元前后处理软件hyperworks联合进行刚柔耦合动力学分析。以蜗轮蜗杆为例,刚柔耦合分析的结果与刚体动力学分析结果对比,柔性体蜗杆角加速度、位移更符合实际情况。且分析所得应力值和云图可以为其设计提供精确的参考。
基于计算机仿真技术新型半主动悬架建模及动力学分析精华文档
基于ANSYS的金属软管的瞬态动力学分析 基于ANSYS的金属软管的瞬态动力学分析
格式:pdf
大小:834KB
页数:4P
4.6
运用非线性有限元法,采用三维壳单元shell93和空间梁单元beam189,利用耦合和约束理论,在ansys中建立金属软管的有限元模型,对金属软管进行瞬态动力学有限元分析,得到金属软管在一个周期内的阻尼迴滞曲线以及动态响应,并将计算结果与试验结果进行比较,证明了有限元建模及其计算结果的正确性,为金属软管的力学性能和动态设计分析以及将来的寿命分析的研究提供了参考。
基于演化博弈论的WSNs信任决策模型与动力学分析 基于演化博弈论的WSNs信任决策模型与动力学分析
格式:pdf
大小:316KB
页数:6P
4.6
针对无线传感器网络(wsns)节点间信任关系建立时的信任决策和动态演化问题,引入与节点信任度绑定的激励机制,建立wsns节点信任博弈模型以反映信任建立过程中表现出的有限理性和每次博弈过程的收益.基于演化博弈论研究节点信任策略选择的演化过程,给出wsns节点信任演化的复制动态方程,提出并证明在不同参数条件下达到演化稳定策略的定理,为wsns信任机制设计提供了理论基础.实验表明了定理结论和激励机制的效果.
履带起重机起臂过程动力学分析 履带起重机起臂过程动力学分析
格式:pdf
大小:468KB
页数:5P
4.7
基于有限元分析技术,建立臂架的有限元模型,在ansys软件中对履带起重机的起臂过程进行动力学分析.用link180单元模拟变幅拉板,利用其在温度载荷下的变形特性,通过设置相关的线性热膨胀系数和温度载荷,使单元长度匀速缩短,带动臂头,完成起臂控制.以位移约束的方法代替常规载荷约束的方法,解决了起臂过程模拟中,由于拉板力大小和方向随时间不断变化,无法定义载荷步的问题.ansys软件结构动力学分析模块中含有瞬态分析模块,可对履带起重机起臂的动态过程进行模拟和有限元分析,为实际的履带起重机起臂调试过程提供参考.
流固耦合界面模型及其在水力机械动力学分析中的应用 流固耦合界面模型及其在水力机械动力学分析中的应用
格式:pdf
大小:1.0MB
页数:7P
4.7
为解决水力机械流固耦合计算中载荷传递的问题,提出了一种新的界面模型。该模型包括流场载荷输出、载荷转换和固体场载荷自动施加三部分。流场载荷输出算法通过输出控制仅输出耦合界面上的流场网格节点压力信息,可以缩短下一步搜索时间并节省存储空间;载荷转换方法基于局部网格信息,对每个固体点考虑其相邻的流场三角形网格,采用邻近点加权平均法得到固体点的载荷,并将载荷转换的信息放在映射矩阵;固体场载荷自动施加算法根据固体网格节点排列顺序确定压力载荷施加表面,并生成压力载荷施加的命令流文件。最后将该模型应用于双吸离心泵叶轮的流固耦合特性分析中,结果表明,载荷转换误差在1%以内,该方法能够高效、高精度地处理不同网格体系间的载荷传递。
单杆柔性机械臂动力学分析 单杆柔性机械臂动力学分析
格式:pdf
大小:396KB
页数:4P
4.7
本文利用d’alembert原理建立了单杆柔性机械的动力学方程,并用模态展开法对其进行了离散化。最后,给出了计算机模拟结果。为进一步开展多杆柔性机械臂动力学分析其控制打下了基础。
基于计算机仿真技术新型半主动悬架建模及动力学分析最新文档
伸缩节的空气动力学分析及改造 伸缩节的空气动力学分析及改造
格式:pdf
大小:59KB
页数:未知
4.3
莱钢烧结厂烧结机原风箱伸缩节为石棉伸缩节,寿命短、阻力损失大,改造为不锈钢波纹管伸缩节后,阻力损失大大降低,不但延长了使用寿命,还节约能源。本文对改造前后的阻损进行了定量计算,指出了大流量系统中管路设计应尽可能降低阻损。
桥式起重机起吊过程的动力学分析 桥式起重机起吊过程的动力学分析
格式:pdf
大小:374KB
页数:4P
4.5
桥式起重机在起吊过程中,结构动力学特性复杂。以主梁薄弱截面(跨中)为研究对象,运用结构动力学理论,从桥式起重机起吊过程的特征出发,将起吊过程简化为二质量二自由度系统,并确立系统主要参数。运用该模型建立起吊过程各阶段系统的运动微分方程。最终求解得出起吊过程跨中的动位移时间函数,通过动位移时间函数得出预张紧阶段结束时间和最大动位移值。最后以某起重机为实例验证了动力学分析结论。
颚式破碎机工况下动力学分析 颚式破碎机工况下动力学分析
格式:pdf
大小:217KB
页数:未知
4.6
通过对颚式破碎机动力学的研究,发现将颚式破碎机简化成四连杆机构进行分析不能准确的解决动力学问题。以各构件的实际情况进行分析,加上工况下的破碎力建立动力学数学模型,运用matlab编程求解,得出各约束反力最大值等,所得数据为颚式破碎机的后续优化提供了依据。
单杆柔性机械臂动力学分析 单杆柔性机械臂动力学分析
格式:pdf
大小:71KB
页数:未知
4.4
本文利用d'alembert原理建立了单杆柔性机械的动力学方程。并用模态展开法对其进行了离散化。最后,给出了计算机模拟结果,为进一步开展多杆柔性机械臂动力学分析其控制打下了基础。
植物叶脉组织的数字化建模与静动力学分析
格式:pdf
大小:406KB
页数:6P
4.5
基于植物叶脉自然选择的结构优越性,构建叶脉的数字化模型,研究其组织结构的力学性能。选取具有典型耐候性和清晰叶脉结构的荷花玉兰叶脉进行叶脉组织结构三维多孔模型的构建,通过图像阈值分割方法对组织结构扫描电镜图进行处理,采用基于狄洛尼三角剖分的面积权重方法对阈值分割后的二值图片进行网格化,形成组织结构的数字化模型;采用有限元法对叶脉横截面多孔组织进行拉伸模拟和冲击仿真。结果表明,叶脉最外缘的区域对叶脉组织力学性能的贡献最大,而具有细胞壁厚度呈梯度变化的叶脉模型在小位移情况下对能量吸收表现出良好的优越性,其冲击破坏过程是依层进行的。
柔性并联平台的动力学建模及主动振动控制 柔性并联平台的动力学建模及主动振动控制
格式:pdf
大小:447KB
页数:未知
4.5
针对柔性并联机器人的结构振动及控制问题,提出在并联机器人的柔性构件上附加多组成对的压电换能器进行振动测量和主动振动控制的方法。首先,设计了基于直线超声电机驱动的3-prr(p代表移动副,r代表转动副)柔性并联定位平台;其次,根据hamilton方程和假设模态法,并考虑到每条支链中柔性杆终端的实际边界条件,分别建立了三条对称支链和移动平台的动力学模型,通过施加闭链约束方程,得到了3-prr柔性并联平台的刚柔耦合动力学方程;然后,为有效抑制振动,在柔性杆上安装多组成对的压电驱动器和传感器,从而使柔性杆具有智能结构的特性;最后,基于此模型,提出了采用pd反馈控制器和srf应变率反馈(strainratefeedback)控制器相结合的混合控制方法来进行轨迹跟踪与振动抑制,并给出了基于李雅普诺夫理论的稳定性证明。matlab仿真结果表明:所提出的基于多组压电换能器的混合控制方法可以使动平台在准确跟踪目标轨迹的同时,实现对柔性杆残余振动的快速抑制,进而提高定位平台的效率和精度,为后续的工程实验提供了理论支撑。
基于假想柔顺控制的膝关节助力机器人动力学分析及其运动控制
格式:pdf
大小:5.4MB
页数:66P
4.6
中国科学技术大学 硕士学位论文 基于假想柔顺控制的膝关节助力机器人动力学分析及其运动控 制 姓名:谢兴旺 申请学位级别:硕士 专业:检测技术与自动化装置 指导教师:余永研 2011-05 摘要 摘要 近年来随着全球范围内人口老年化趋势日益加剧,可穿戴型助力机器人已 经成为重点的研究领域之一,膝关节助力机器人作为可穿戴型助力机器人的重要 组成部分,科学家对其技术的开发和研究已经取得巨大的进步。膝关节助力机器 人将环境感知和多传感器信息融合和运动控制等多种功能集于一身,是典型的人 机一体化系统。当人穿上膝关节助力机器人时,机器人在人的智力指导下为人的 行走提供助力从而扩展了人的运动能力和活动范围。 在国家自然科学基金“可穿戴型智能助力机器人技术研究”的资助下,本 文采用假想柔顺控制策略和pid控制算法,实现了膝关节助力机器人为人提供助 力的目的。具体内容包括: 1.通过分析
隙控式全射流喷头运转动力学分析 隙控式全射流喷头运转动力学分析
格式:pdf
大小:260KB
页数:5P
4.5
针对隙控式全射流喷头在恶劣工作条件下出现的附壁力小、驱动力矩小等不足,研究了获得射流元件的最大附壁驱动力矩和减小摩擦阻力矩的方法,对射流元件进行优化设计,以保证喷头的正常运转.分析了隙控式全射流喷头的转动驱动力矩和摩擦阻力矩,喷头转动驱动力矩由射流附壁时与射流元件侧壁产生的驱动力矩,射流与出口盖板的作用力矩组成,喷头的摩擦阻力矩由空心轴端面摩擦阻力矩,空心轴与轴套间的摩擦力矩,密封机构摩擦阻力矩组成.根据动量守恒方程推导出附壁射流中心线方程,得到中心线附壁点距离及附壁冲角的计算公式.推导了理论状态下,附壁力矩最大值与结构尺寸之间的关系.由刚体转动定律计算出全射流喷头的力矩公式及全射流喷头步进角度公式.
冲击地压巷道围岩支护作用动力学分析
格式:pdf
大小:858KB
页数:7P
3
冲击地压巷道围岩支护作用动力学分析——建立了冲击地压巷道围岩支护作用动力学模型,模型将上覆岩层简化为由多个质量块组成的块系,岩块简化为刚体,岩块间的连接简化为kelvin-voigt模型,把支护系统简化为弹簧和耗能阻尼器,初始岩块受冲击载荷作用。支护系...
关于棱柱杆侵彻岩土的动力学分析
格式:pdf
大小:172KB
页数:2P
3
关于棱柱杆侵彻岩土的动力学分析——根据动量定理和功能守恒定律,建立了棱柱杆侵彻岩土时的动力学模型,对几何形状较复杂的棱柱杆侵彻岩土时的撞击力和侵入位移进行了计算和分析,得到了棱柱杆主要几何参数的合理范围,为进一步研究棱柱杆的侵彻能力和损伤状况...
基于计算机仿真技术新型半主动悬架建模及动力学分析相关
文辑推荐
知识推荐
百科推荐


职位:化工技术应用化工工程师
擅长专业:土建 安装 装饰 市政 园林


