

基于分布式的四轴履带螺栓拧紧机控制系统设计
格式:pdf
大小:536KB
页数:4P
人气 :82
 4.5
4.5
文章主要针对不同品种不同节距的履带以及人工拧紧履带效率低下和不可靠性的问题,设计一种可以对履带螺栓进行自动批量拧紧的设备。采用了以S7-200为主站,AtlasCopco拧紧控制器和CEU2行程可读气缸控制器为从站的分布控制方案,能适应各种类型的履带螺栓的拧紧,而且能精确控制螺栓的拧紧扭矩,并生成履带每根螺栓的拧紧质量报告记录,可节省40%的生产时间,大大提高履带的生产效率。文章主要阐述所设计的四轴履带螺栓拧紧机系统的结构、配置、分布式控制方案及拧紧机工作流程。



 分布式擦窗机器人控制系统设计
分布式擦窗机器人控制系统设计 分布式擦窗机器人控制系统设计
根据试验平台对开放性、实时性和可靠性的需求,为"蓝天洁士-4"型擦窗机器人设计了分布式控制系统。系统以arm微控制器和avr单片机组成的上下位机构成机器人本体控制器,以pc机构成机器人监控和规划器。为了兼顾系统的安全性和开放性,在机器人本体控制器的上位机中采用了基于μc/os-ⅱ的rtos作为开发平台,在pc机上利用动态链接库封装机器人底层动作和信息查询指令。给出了多任务系统的任务划分规则,利用多线程实现了监控软件,分析了动作线程和查询线程的工作流程。
工业蒸汽锅炉分布式控制系统设计 工业蒸汽锅炉分布式控制系统设计
针对工业燃煤锅炉的工艺流程和控制要求,设计人员研究了基于现场总线技术的工业锅炉控制系统的设计思想,分析了利用炉膛综合热量信号来间接地控制燃烧控制系统的设计与实现方案。该系统控制方案新颖,克服了煤质对燃烧系统的扰动影响,其运行稳定可靠,控制精度及响应时间都有所提高,取得了较好的控制效果。
编辑推荐下载
变矩三轴螺栓拧紧机的设计 变矩三轴螺栓拧紧机的设计
格式:pdf
大小:557KB
页数:3P
4.4
介绍了一种大型球阀机械密封锁定螺栓拧紧与松卸的自动化改造设计方案。大型球阀广泛用于水力发电厂发电机组叶轮蜗壳前端。叶轮检修时需将球阀关闭,同时对阀体内部机械密封。均布于法兰盘上连接螺栓内侧的三十个螺栓拧紧时对球阀密封,松卸至规定位置时解封。设计采用三轴拧紧机变矩拧紧方案解决球阀机械密封螺栓的自动化投退问题,设备由转动轨道装置、拧紧机、自动控制系统构成,具有自动定位、自动套进螺栓、扭矩值及行程自动控制功能。拧紧及松卸的质量可靠,提高了生产效率,避免了工人高空作业。
基于CAN总线的凿岩机器人分布式控制系统设计 基于CAN总线的凿岩机器人分布式控制系统设计
格式:pdf
大小:842KB
页数:4P
4.5
分析了凿岩机器人控制系统的构成,针对集中控制方式的缺点,提出了分布式控制系统的方案.分配了can总线智能节点及其功能,设计了适合于凿岩机器人实时性要求的can总线用户协议.提出了各智能节点的通信设计要求,以协调总线上的信息流,减小总线冲突仲裁所需时间.
分布式的四轴履带螺栓拧紧机控制系统设计热门文档
四轴飞行器姿态控制系统设计 四轴飞行器姿态控制系统设计
格式:pdf
大小:133KB
页数:3P
4.3
由于四轴飞行器系统具有不稳定、非线性、强耦合等特性,所以姿态控制在飞行器完成飞行任务的过程中尤为重要.本文着重对飞行器姿态控制算法进行研究.首先对飞行器建立合理的坐标系,根据角度传感器所测得的角度,得到以四元数表示的姿态转换矩阵.根据空气动力学原理,牛顿第二定律,对飞行器建立动力学模型,得到四个独立通道的控制输入量,该控制输入量可以通过控制四轴飞行器各个方向的加速度来对飞行器进行姿态控制.
螺栓自动拧紧机拧紧控制方法的探讨 螺栓自动拧紧机拧紧控制方法的探讨
格式:pdf
大小:109KB
页数:未知
4.3
在机械结构中螺纹紧固件已成为必不可少的机械零件,了解国内外螺栓自动拧紧设备的现状。对螺纹拧紧控制方法进行探讨,分析各种方法的优缺点。
履带式液压挖掘机履带螺栓的断裂失效分析 履带式液压挖掘机履带螺栓的断裂失效分析
格式:pdf
大小:199KB
页数:3P
4.4
在履带式工程车辆中,履带板是利用履带螺栓固定在履带链上,由左右驱动轮实施驱动。我公司在试制国内某工程机械研究所设计的wy12.5型履带式液压挖掘机中,有履带板86块,每块均由4个履带螺栓固定于履带链上,是要求可靠性高的联接件。然而,在试制过程中,曾多次发生履带螺栓装配拧断的重大事故。一、技术要求及装配条件设计的履带螺栓形状如图1所示,材质为40cr钢,热处理要求:调质230~269hbw,sr20mm
新型电站分布式综合自动化控制系统设计 新型电站分布式综合自动化控制系统设计
格式:pdf
大小:162KB
页数:3P
4.4
自二十世纪以来,船舶自动化经历了一个从单元自动化、机舱无人值班到全船自动化的过程。为了实现船舶电站可靠的运行、控制和管理,提高无人机舱的自动化程度,本文设计了一套新型的船舶电站分布式综合自动化控制系统,用先进的工业控制技术和计算机网络编程技术提高系统的可靠性和经济性。
数控切片机双轴控制系统设计与开发 数控切片机双轴控制系统设计与开发
格式:pdf
大小:267KB
页数:未知
4.4
数控切片设备采用电气结合的方式,实现对加工对象进行自动切片功能;主控板硬件设计采用了基于stm32f103vct6arm芯片作为核心主芯片,实现2轴伺服电机控制和编码器信号的实时反馈功能,确保系统运行加工距离精准;同时,还实现了与基于modbusrtu协议的工业触摸屏的通信及spi接口的数据存储功能,具有人性化的人机交互界面和多种切片类型参数的存储;软件实现采用了模块化的实现方案,采用定时器模块实现伺服控制与编码反馈输入,spi模块实现存储,串口模块实现显示通信功能;本数控切片系统的开发成功,将大大提高切片加工的效率和精度,促进企业人机功效。
分布式的四轴履带螺栓拧紧机控制系统设计精华文档
 自动刷花机的嵌入式控制系统设计
自动刷花机的嵌入式控制系统设计 自动刷花机的嵌入式控制系统设计
格式:pdf
大小:1.4MB
页数:4P
4.4
本文从自动刷花机的原理出发,剖析了刷花内部结构。详细的分析了自动刷花机控制原理,以嵌入式arm核s3c2410处理器为控制器核心,在windowsce系统上进行了控制系统设计。
![螺栓力矩拧紧法拧紧异常的控制[1]](https://files.zjtcn.com/group1/M00/AC/4F/CgoBZ2BeC6mAIVOLAABLVPuQysg095.jpg)
螺栓力矩拧紧法拧紧异常的控制[1]
格式:pdf
大小:1.4MB
页数:3P
4.6
**资讯http://www.***.*** **资讯http://www.***.*** **资讯http://www.***.***
法兰配带螺栓数
格式:pdf
大小:69KB
页数:3P
4.5
法兰配带螺栓数 设计项目设计 设计阶段校核 图号审核 pn0.6 法兰规格(国标)孔数螺栓规格螺栓数(套)/组螺栓材料螺栓标准 dn504m12×70435#-25#gb dn654m12×71435#-25#gb dn804m16×85435#-25#gb dn1004m16×85435#-25#gb dn1258m16×85835#-25#gb dn1508m16×90835#-25#gb dn2008m16×95835#-25#gb dn25012m16×1001235#-25#gb dn30012m20×1051235#-25#gb dn35012m20×1101235#-25#gb dn40016m20×1151635#-25
分布式的四轴履带螺栓拧紧机控制系统设计最新文档
基于CAN变电站分布式控制系统的设计 基于CAN变电站分布式控制系统的设计
格式:pdf
大小:198KB
页数:3P
4.3
一种基于can总线的变电站分布式控制系统的设计方案;给出了智能监控变电站控制系统的硬件电路、软件设计程序和通信程序设计。在软/硬件设计中均采用了模块化的结构,具有高度的灵活性和广泛的适用性,经系统测试和实际运行表明,该系统安装使用方便、可靠性高,达到了设计要求,具有一定的参考和推广价值。
洗衣机控制系统设计.
格式:pdf
大小:1.7MB
页数:17P
4.5
电气控制技术课程设计说明书 题目:洗衣机控制系统设计 学院:机电工程学院 专业:电气工程及其自动化 姓名: 学号: 指导教师: 完成日期:2014年5月22日 目录 一、电气控制技术课程设计------------------------1 1.1、课程设计题目-------------------------------------------------------------------------1 1.2设计任务------------------------------------------------------------------------------1 1.3课程设计的目的----------------------------------------------------------------------1 1.
针对单轴电枪拧紧多螺栓工位扭矩衰减的控制 针对单轴电枪拧紧多螺栓工位扭矩衰减的控制
格式:pdf
大小:109KB
页数:3P
4.8
针对单轴电枪拧紧同一工件多颗螺栓工位出现的扭矩衰减问题现状,结合连接件特性,从拧紧顺序,拧紧步骤,电枪转速方面对拧紧工艺进一步优化,并结合实际进行分析说明。
螺栓拧紧技术
格式:pdf
大小:274KB
页数:8P
4.3
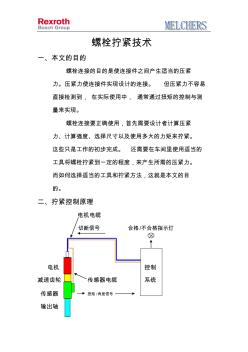
螺栓拧紧技术 一、本文的目的 螺栓连接的目的是使连接件之间产生适当的压紧 力。压紧力使连接件实现设计的连接。但压紧力不容易 直接检测到,在实际使用中,通常通过扭矩的控制与测 量来实现。 螺栓连接要正确使用,首先需要设计者计算压紧 力、计算强度、选择尺寸以及使用多大的力矩来拧紧。 这些只是工作的初步完成。还需要在车间里使用适当的 工具将螺栓拧紧到一定的程度,来产生所需的压紧力。 而如何选择适当的工具和拧紧方法,这就是本文的目 的。 二、拧紧控制原理 电机电缆 切断信号合格/不合格指示灯 电机控制 减速齿轮传感器电缆系统 传感器扭矩/角度信号 输出轴 三、拧紧过程的一些基本概念 3.1拧紧过程 当螺纹连接被拧紧时,由于螺纹的几何形变,使螺栓 受拉,被连接件受压。如下图所示(压紧力与螺栓角位移之 间的关系)。 螺栓(或螺母)到达配合面后,拧紧过程真正开始。 初始阶段,由
喷油式螺杆真空泵的控制系统设计 喷油式螺杆真空泵的控制系统设计
格式:pdf
大小:215KB
页数:未知
4.5
本文以我公司某款真空泵产品为例,系统阐述了喷油式螺杆真空泵机组的主要结构特点、工作流程,并具体分析了其控制系统的运作原理、功能特点及设计方法,给相关真空泵控制系统的设计提供了有益的借鉴。
分层-分布式凿岩机器人控制系统的设计与实现 分层-分布式凿岩机器人控制系统的设计与实现
格式:pdf
大小:1.5MB
页数:5P
4.6
采用分层-分布式结构,设计了由规划层、协调层和分布式执行层构成的3层-分布式双臂凿岩机器人控制系统,有效地降低了系统的复杂程度,使系统的可维护性、可靠性及可扩展性得到提高。给出了控制系统的基本构成和软、硬件的实现,分析了工作原理及工作过程。
螺栓拧紧扭力标准
格式:pdf
大小:25KB
页数:1P
4.8
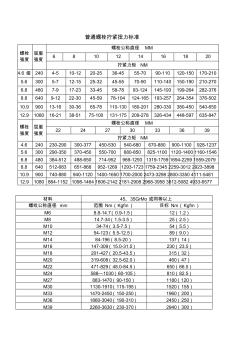
普通螺栓拧紧扭力标准 螺栓 强度 屈服 强度 螺栓公称直径mm 68101214161820 拧紧力矩nm 4.6级2404-510-1220-2536-4555-7090-110120-150170-210 5.63005-712-1525-3245-5570-90110-140150-190210-270 6.84807-917-2333-4558-7893-124145-193199-264282-376 8.86409-1222-3045-5978-104124-165193-257264-354376-502 10.990013-1630-3665-78110-130180-201280-330380-450540-650 12.91080
机械手的控制系统设计毕业论文
格式:pdf
大小:1.2MB
页数:24P
4.4
嘉兴职业技术学院毕业论文(设计) 嘉兴职业技术学院 毕业设计(论文) 题目名称:机械手的控制系统 姓名: 所在分院:机电与汽车分院 专业班级: 指导教师: 2014年6月1日 嘉兴职业技术学院毕业论文(设计) 摘要 机械手是近几十年发展起来的一种高科技自动化生产设备。通过编程来完成 各种动作,它的准确性和多自由度,保证了机械手能在各种不同的环境中工作。 机械手在工业生产中应用较多,机械手的使用能够显著的提高生产效率,减少人 为因素造成的废次品率。机械手可以完成很多工作,它在自动化车间中用来运送 物料,从事多种工艺操作。它的特点是通过编程来完成各种预期的作业,在构造 和性能上兼有人和机器人的部分优点,尤其体现了人的灵活协调和机器人的精确 到位。矚慫润厲钐瘗睞枥庑赖。 机械手是在机械自动化生产中逐步发展出的一种新型装置。现代生产过程中 机械手被广
分布式的四轴履带螺栓拧紧机控制系统设计相关
文辑推荐
知识推荐
百科推荐


职位:高级大数据工程师
擅长专业:土建 安装 装饰 市政 园林


