

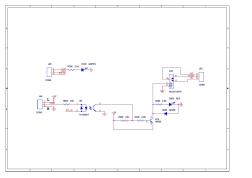
基于H桥电机驱动模块L292的埋弧焊送丝电路
格式:pdf
大小:301KB
页数:4P
人气 :58
 4.5
4.5
在埋弧焊下降特性电源-变速送丝系统中,送丝速度调节的快慢直接影响电弧电压的稳定性。基于H桥电机驱动模块L292,采用光电耦合器将模块电路和MOSFET高压驱动电路隔离开,设计了快速调节的双极式可逆高压H桥直流电机送丝电路。结果表明,当驱动模块电压与电机额定电压不同时,高速光电耦合器的应用是一种简单、行之有效的方法,使L292能够对110 V送丝电机的转速和转向进行控制。



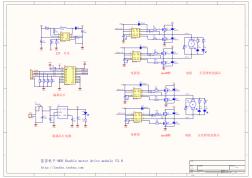
L298双H桥直流电机驱动板指导手册
1 l298双h桥直流电机驱动板指导手册v0.1 一、产品参数: 1、驱动芯片:l298n双h桥直流电机驱动芯片 2、驱动部分端子供电范围vs:+5v~+35v;如需要板内取电,则供电范围 vs:+7v~+35v 3.驱动部分峰值电流io:2a 4.逻辑部分端子供电范围vss:+5v~+7v(可板内取电+5v) 5.逻辑部分工作电流范围:0~36ma 6.控制信号输入电压范围: 低电平:-0.3v≤vin≤1.5v 高电平:2.3v≤vin≤vss 7.使能信号输入电压范围: 低电平:-0.3≤vin≤1.5v(控制信号无效) 高电平:2.3v≤vin≤vss(控制信号有效) 8.最大功耗:20w(温度t=75℃时) 9.存储温度:-25℃~+130℃ 10.驱动板尺寸:55mm*49mm*33mm(带固定铜柱和散热片高度) 11
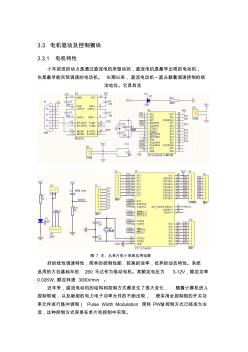
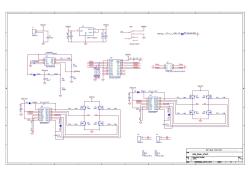
电机驱动及控制模块
3.3电机驱动及控制模块 3.3.1电机特性 小车前进的动力是通过直流电机来驱动的,直流电机是最早出现的电动机, 也是最早能实现调速的电动机。长期以来,直流电动机一直占据着调速控制的统 治地位。它具有良 图7主、从单片机小系统应用电路 好的线性调速特性,简单的控制性能,较高的效率,优异的动态特性。系统 选用的大谷基础车的260马达作为驱动电机。其额定电压为3-12v,额定功率 0.02kw,额定转速3000r/min。 近年来,直流电动机的结构和控制方式都发生了很大变化,随着计算机进入 控制领域,以及新型的电力电子功率元件的不断出现,使采用全控制型的开关功 率元件进行脉冲调制(pulsewidthmodulation简称pwm)控制方式已经成为主 流,这种控制方式容易在单片机控制中实现。 pwm技术的具体有点: 调速范围宽,可以使电机安全地工作在每分钟几转
编辑推荐下载
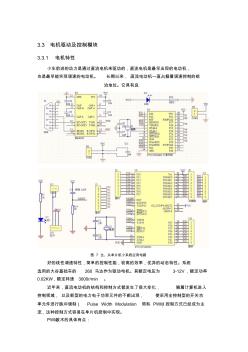
电机驱动及控制模块
格式:pdf
大小:2.7MB
页数:5P
4.3
3.3电机驱动及控制模块 3.3.1电机特性 小车前进的动力是通过直流电机来驱动的,直流电机是最早出现的电动机, 也是最早能实现调速的电动机。长期以来,直流电动机一直占据着调速控制的统 治地位。它具有良 图7主、从单片机小系统应用电路 好的线性调速特性,简单的控制性能,较高的效率,优异的动态特性。系统 选用的大谷基础车的260马达作为驱动电机。其额定电压为3-12v,额定功率 0.02kw,额定转速3000r/min。 近年来,直流电动机的结构和控制方式都发生了很大变化,随着计算机进入 控制领域,以及新型的电力电子功率元件的不断出现,使采用全控制型的开关功 率元件进行脉冲调制(pulsewidthmodulation简称pwm)控制方式已经成为主 流,这种控制方式容易在单片机控制中实现。 pwm技术的具体有点: 调速范围宽,可以使电机安全地工作在每分钟
H桥电机驱动模块L292的埋弧焊送丝电路热门文档
 VXI总线电机控制驱动模块设计
VXI总线电机控制驱动模块设计 VXI总线电机控制驱动模块设计
格式:pdf
大小:603KB
页数:5P
4.4
本文介绍了vxi总线c尺寸电机控制驱动模块设计方法。该模块能够同时控制四路直流电机的运动,本文对模块的关键设计进行讨论,包括vxi总线接口电路选择,控制驱动电路设计和反馈电路设计,重分析了主控cpu的选择以及控制算法的实现等关键问题

开关电源驱动模块
格式:pdf
大小:1.6MB
页数:6P
4.5
pm40xxa系列大功率开关电源驱动模块 站长:刘铎 pm4060a最大驱动能力为60a的mos管或120a的igbt管、采用该模块设计一个大功 率1000w的开关电源是十分简单的事情 最新出版:40w数字功放-d类功放原理和制作制作资料下载(2007.12.26更新) :电压控制型-开关电源全桥驱动器pm4040fpdf技术资料下载(2007.07.17更新)设计 220v-380v到300w-5kw的开关电源显得更简单和方便。pm4040f电源驱动器实用电路下 载2007.07.10 图1是为大功率开关电源设计的专业驱动模块,模块型号定义为:pm4020a和pm4060a 两种,pm4020a最大驱动为(以mos管为例25a;mos管)在应用驱动最老的mos管 是irfp460内部电容大约
EPS系统H桥上管驱动电路的研究 EPS系统H桥上管驱动电路的研究
格式:pdf
大小:778KB
页数:4P
4.7
分析了传统电动助力转向系统电机驱动电路h桥的工作特性。简单介绍了目前h桥电路专用驱动芯片,分析了在eps的h桥电路中不使用专用驱动芯片的原因。并在此基础上针对电动助力转向系统的实际需求提出了几种h桥上管驱动电路的可行方案。这些方案在我们开发eps的过程中均经过了实践检验。
6直流电机驱动电路的设计
格式:pdf
大小:481KB
页数:5P
4.7
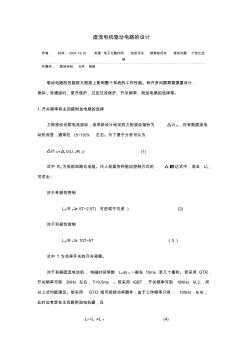
直流电机驱动电路的设计 作者:时间:2007-12-10来源:电子元器件网浏览评论推荐给好友我有问题个性化定 制 关键词:直流电机元件制造 驱动电路的性能很大程度上影响整个系统的工作性能。有许多问题需要慎重设计, 例如,导通延时、泵升保护、过压过流保护、开关频率、附加电感的选择等。 1.开关频率和主回路附加电感的选择 力矩波动也即电流波动,由系统设计给定的力矩波动指标为δi/in,对有刷直流电 动机而言,通常在(5~10)%左右。为了便于分析可认为 δi/in=δi/(us/rd)(1) 式中rd为电枢回路总电阻。代入前面各种驱动控制方式的δi表达式中,消去us, 可求出: 对于单极性控制 ld/rd≥5t~2.5t(可逆或不可逆)
建筑塔钟步进电机驱动电路 建筑塔钟步进电机驱动电路
格式:pdf
大小:174KB
页数:未知
4.4
人们经常能见到一些高大建筑上设置有巨型建筑钟。以往,这些建筑钟多用步距角为180°的步进电机驱动。这种电机在来自电网及周围环境的干扰电磁脉冲的影响下,容易出现误触发而快走。其步距太大也会产生失步故障。解决上述问题的方法之一是采用小步距角高频率驱动的步进电机。本文介绍一种可驱动直径达5m的巨型建筑钟的电路。一、电路原理整机电原理图如图所示,全部电路由5块集成电路组成。其中ic1(cd4060)为带振荡电路的14级分频器,将晶振xt的4.194304mhz分频成256hz的方波,由ic1③脚q14端
H桥电机驱动模块L292的埋弧焊送丝电路精华文档
两相超声电机驱动电路设计 两相超声电机驱动电路设计
格式:pdf
大小:198KB
页数:2P
4.6
两相超声电机是近年来普遍使用的一种先进的超声电机,是科学技术发展的重要产物。由于用于两轴工作平台的两相超声电机逻辑控制电路要求相对复杂,因此,本文提出了一种基于模拟式和数字式的解决方案,并对两个方案的特点进行了对比。研究表明,模拟式驱动方案能够有效解决前期对两相电机的驱动需求,但是却不能很好地处理工作平台两轴之间的快速切换,且该方案操作繁琐。而数字式驱动方案能够有效解决上述问题,在驱动波形的产生、功率放大和稳定控制上更加简便、快捷。
 集成光电隔离驱动模块设计及应用
集成光电隔离驱动模块设计及应用 集成光电隔离驱动模块设计及应用
格式:pdf
大小:389KB
页数:3P
4.4
根据igbt门极驱动电路的特点,分析了光电隔离驱动模块hcpl316j的工作原理和特性;给出与微处理器接口的电路和试验。结果表明,该电路灵活、可靠。
高压脉冲串联模块的驱动电路 高压脉冲串联模块的驱动电路
格式:pdf
大小:306KB
页数:3P
4.5
基于研究高压脉冲串联各个模块的同步性问题,设计了一种适用于串联模块开关管的同步驱动电路。该驱动电路采用sg3525提供独立的供电电源,利用隔离变压器实现主控电路的隔离措施。由于各个模块的驱动信号都来自于同一个信号源,因此能够保证各个模块的驱动信号的一致性。
H桥电机驱动模块L292的埋弧焊送丝电路最新文档
一种隔离开关驱动模块的设计 一种隔离开关驱动模块的设计
格式:pdf
大小:285KB
页数:未知
4.4
提出了一种隔离开关驱动模块的结构原理,由储能系统和力学传递系统组成,适用于正面和侧面操作方式。利用pro/e建立力学模型,模拟分/合闸动作,分析各受力件的机械强度。通过公差分析,对关键尺寸公差进行控制,使实际产品性能与设计概念相符,并通过试验验证。
小型柱体超声波电机驱动控制电路的研究
格式:pdf
大小:233KB
页数:5P
4.4
http://www.***.*** -1- 小型柱体超声波电机驱动控制电路的研究 潘序之,王心坚,金龙 东南大学电气工程学院,南京(210096) e-mail:pxz0805@126.com 摘要:柱体超声波电机作为一种新型电机,介绍了其运行机理。利用分频电路与功率pwm 的逻辑组合,设计了四路pwm驱动波形产生的方法。讨论了驱动电路设计中存在的问题, 并进行了速度pid调节。 关键词:小型柱体超声电机,功率pwm,电路匹配,pid调速 中图分类号:tm3 1.引言 小型柱体超声波电动机以其体积小、结构简单、不用粘接等独特优点在小型化精密控制 领和非连续运动领域有广阔的应用前景。日本佳能公司已将小型柱体超声波电机取代环形超 声波电机用于镜头调焦系统。 日本的minorukurosawa于1989年首先介绍了双转子柱体超声
直线电机驱动潜油无杆泵 直线电机驱动潜油无杆泵
格式:pdf
大小:219KB
页数:2P
4.7
目前在各大油田采油厂的生产中,管、杆偏磨成为一个不容忽视的问题,直线电机驱动潜油无杆泵的应用则可以有效解决这一问题。直线电机驱动潜油无杆泵是把潜油直线电机与动筒式抽油泵结合为一体的无杆采油系统,潜油直线电机直接驱动抽油泵,取消了机械传动部分,减少了功率损耗。潜油直线电机采用永磁同步直线电机,功率因数高,励磁电流小。抽油泵为上行程时吸液,下行程时排液的工作方式的新型动筒式抽油泵,适合潜油直线电机位于抽油泵下方的工作方式。
三相步进电机驱动
格式:pdf
大小:28KB
页数:3P
4.6
三相步进电机驱动 三相步进电机的三相六拍工作方式,正转的绕组通电顺序: a、ab、b、bc、c、ca、a,反转的通电顺序: a、ac、c、cb、b、ba、b、a。 由于步进电机转子有一定的惯性以及所带负载的惯性,故步进电机的工作过 程中不能及时的启动和停止,在启动时应慢慢的加速到预定速度,在停止前应 逐渐减速到停止,否则,将产生失步现象。 步进电机的控制问题可总结为两点: 1、产生工作方式需要的时序脉冲; 2、控制步进电机的速度,使它始终遵循加速、匀速、减速的规律工作。 系统: 接口: 程序: #includeio8515v.h #includemacros.h constcharzhzhuan[7]={0x06,0x04,0x05,0x01,0x03,0x02,0x00}; constcharfanzhuan[7]={0x06,0x02,0x03,0x01,0x05,0x0
多电机驱动皮带机驱动装置的选配设计 多电机驱动皮带机驱动装置的选配设计
格式:pdf
大小:146KB
页数:4P
4.5
文章围绕皮带机的前期投入和后期运行成本,主要介绍了多电机驱动皮带机设计过程中,如何合理选择两个传动滚筒功率配置,各种驱动组合形式的优缺点及选择方法,达到设计的合理性。
H桥电机驱动模块L292的埋弧焊送丝电路相关
文辑推荐
知识推荐
百科推荐


职位:造价审核岗
擅长专业:土建 安装 装饰 市政 园林


