

基于ADAMS六足高层建筑清洁机器人的建模与仿真
格式:pdf
大小:1.7MB
页数:4P
人气 :56
 4.7
4.7
针对高层建筑清洁的实际需要,采用SolidWorks和ADAMS软件相结合的方法,利用Solid Works构建了一种六足高层建筑清洁机器人的模型,通过ADAMS内部的仿真分析功能对模型进行仿真分析,获得该机器人的运动学特性与数据,验证机构设计的合理性。同时,在对机器人机构进行分析、推导、计算时,采用ADAMS对机构进行分析解算,实现了机器人运动的可视化,可直观的了解了机器人清洁的工作过程,为其样机的研制提供参考依据。


编辑推荐下载

 嵌入式清洁机器人系统设计
嵌入式清洁机器人系统设计 嵌入式清洁机器人系统设计
格式:pdf
大小:79KB
页数:2P
4.7
室内地面清洁是一项枯燥乏味的重复性劳动,传统吸尘器工作时需要人的参与,且操作不便。室内地面清洁机器人将移动机器人技术和吸尘器技术有机地融合起来,结构灵巧,实现了室内环境的自主清洁,是一种环保、健康、智能型的服务机器人,具有广阔的应用前景和市场需求。本设计实现一种全自主清洁机器人,并对路径规划、避障算法、自动充电算法进行研究。
ADAMS六足高层建筑清洁机器人的建模与仿真热门文档
【CN209789757U】水箱及清洁机器人【专利】
格式:pdf
大小:644KB
页数:11P
4.5
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号201920262995.7 (22)申请日2019.03.01 (73)专利权人东莞芯速科技有限公司 地址523000广东省东莞市松山湖高新技 术产业开发区工业南路8号创投大厦 106室 (72)发明人不公告发明人 (51)int.cl. a47l11/24(2006.01) a47l11/28(2006.01) a47l11/40(2006.01) (esm)同样的发明创造已同日申请发明专利 (54)实用新型名称 水箱及清洁机器人 (57)摘要 本实用新型公开一种水箱及清洁机器人,该 水箱包括内部不设有渗水布及其固定件的水箱 本体和抹布,该水箱本体的底部开设有弧线分布 的渗水孔,其中,渗水孔的上表面不盖设有渗水
中央空调管道式通风系统清洁机器人
格式:pdf
大小:1.0MB
页数:6P
4.8
针对现有中央空调管道清洗机器存在的不能有效清洗截面高度在300mm以下的管道;不能有效清洗竖直管道;机器人在管道内越过障碍比较困难;当管道截面变化时,刷子不能始终紧贴壁面,清扫效率低下的问题,研制了一种新的中央空调管道式通风系统清洁机器人。机器人采用腿足式吸附行走机构和全新设计的双滑槽摆动清扫机构。通过对机器人的机构组成、工作原理、静力学及运动学特性进行分析,并经过仿真和实验证明,该机器人能够实现清扫截面高度为160mm~1000mm的管道;横管、竖管都可以清洗;清扫机构自动适应管道截面变化,能够同时清扫两个壁面,提高清扫效率。
中央空调垂直风管清洁机器人机构设计
格式:pdf
大小:258KB
页数:3P
3
中央空调垂直风管清洁机器人机构设计——针对目前国内外中央空调通风管道清洁机器人的研究现状,提出了一种垂直通风管道清洁机器人的设计思路。该机器人主要由支撑机构、清洁机构组成。支撑机构采用了伞状支架,能够适用于矩形或圆形管道;清洁机构采用了钢丝...
储罐爬壁机器人的喷漆机构设计及ADAMS仿真 储罐爬壁机器人的喷漆机构设计及ADAMS仿真
格式:pdf
大小:292KB
页数:未知
4.5
为提高储罐爬壁机器人的喷漆质量及工作效率,研究了一种可实现z字形轨迹的喷漆机构。该机构以爬壁机器人为载体,通过与机器人运动的协同控制,能够实现良好的喷漆效果,具有喷枪高度、间距及喷射角度调节等功能,该机构便于实现大型储罐表面的各种自动化喷漆作业。分析了机构实现原理,完成整体结构设计,利用adams软件建立喷漆机构的虚拟样机模型并进行运动学仿真,验证了设计方案的可行性。
基于ADAMS的RC-5.5型揉草机的建模与仿真 基于ADAMS的RC-5.5型揉草机的建模与仿真
格式:pdf
大小:595KB
页数:3P
4.4
通过模拟rc-5.5型揉草机的运动过程,研究了用仿真软件进行机械设计的可行性。应用adams软件建立了rc-5.5型揉草机仿真模型,通过动态仿真,模拟实际工作状态,得到揉草机的运动参数。另外,通过仿真得出草的运动轨迹和速度变化曲线,经分析得出了揉草机的切草速度和切草长度等参数。分析结果与设计要求相符,说明利用adams软件进行农业机械的设计是可行的。
ADAMS六足高层建筑清洁机器人的建模与仿真精华文档
喷涂机器人油漆沉积率优化建模与仿真 喷涂机器人油漆沉积率优化建模与仿真
格式:pdf
大小:2.4MB
页数:5P
4.5
油漆沉积率模型是自动编程工艺参数选取的重要依据,为了建立符合实际工况的漆膜模型,采用喷涂机器人喷涂时椭圆型雾锥的实验数据,将贝叶斯归一化神经网络法和遗传算法分别用于漆膜模型的拟合。经过对比分析,采用2种算法得出模型都具有较高的精度,但遗传算法收敛速度更快,并可得出油漆沉积率方程的具体表达式,更适合油漆沉积率建模。
新型除锈爬壁机器人附壁建模与仿真 新型除锈爬壁机器人附壁建模与仿真
格式:pdf
大小:699KB
页数:6P
4.5
设计了1种永磁真空混合附壁的船舶壁面除锈爬壁机器人,该机器人负载大、本体重,机器人的附壁面法向存在水射流反冲力和真空负压压力。建立了机器人下滑和后翻两静态模型,结合船壁面法向的3种受力状态,分别对下滑模型和后翻模型进行了分析,并将两模型永磁单元所需吸附力进行了对比。仿真和实验结果表明,真空负压提高机器人附壁能力明显,可以较大地降低永磁吸附单元所需吸附力,减小机器人负载,较低的真空负压可实现辅助永磁良好附壁,在保证灵活运动的前提下吸附可靠。
六足机器人模块化结构设计 六足机器人模块化结构设计
格式:pdf
大小:813KB
页数:4P
4.7
为实现性能优越而结构简单的六足移动设想,通过对六足机器人进行步态和传动结构特征的分析,提出了六足机器人模块化结构设计方案,并利用solidworks完成了各模块及机器人的整体构型。最后,对其结构特征进行了分析,论证了该六足机器人的特性和优势。研究结果表明,该模块化结构设计方案有助于推动六足机器人的广泛应用。
独轮机器人侧向通道建模与控制 独轮机器人侧向通道建模与控制
格式:pdf
大小:385KB
页数:未知
4.7
利用拉格朗日建模方法推导出基于惯性飞轮平衡原理的独轮机器人侧向通道动力学方程.在该动力学方程基础上分别设计了pd和lqr两种控制器,并分别进行了仿真和物理实验验证.实验中独轮机器人从侧倾一定角度,在控制的惯性飞轮运动作用下最终回到竖直平衡位置,完成了独轮机器人侧平衡控制目标.仿真和物理实验结果均证明了所建立的动力学方程的正确性和控制器的有效性.
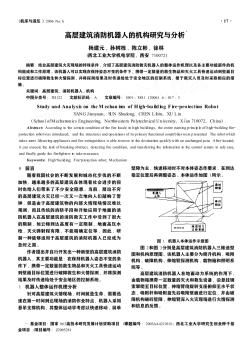
高层建筑消防机器人的机构研究与分析
格式:pdf
大小:657KB
页数:3P
4.5
结合高层建筑火灾现场的特殊条件,介绍了高层建筑消防救灾机器人的整体运作机理以及各主要功能部件的机构组成和工作原理。该机器人可以实现在保持姿态不变的条件下,携带一定数量的救生物品和灭火工具快速运动到壁面目标位置进行破障救生和火情探测,并将探测结果及时传递给处于安全地区的控制系统,便于救灾人员及时采取相应的措施。
ADAMS六足高层建筑清洁机器人的建模与仿真最新文档

abb机器人仿真步骤
格式:pdf
大小:2.6MB
页数:12P
4.4
作图步骤: 1、双击桌面robotstudio5.15图标,如下图所示。 点击左侧选项栏,选择授权。 然后选择激活向导,选择如下: 2、点击创建文件,出现如下界面。 3、选择机器人模型,点击abb模型库,出现如下界面,选择irb2600.把承重能力改为20kg. 4、然后点击导入模型库,下拖选择mytool后,然后把左侧边mytool工具拖到 irb2600-20-165-01,机器人上自动安装了喷头工具。 5、然后点击机器人系统菜单,选择从布局创建系统。 在此项目中,可以在名称处修改系统的名称,尤其在系统多的情况下。在主菜单中,一定要 修改工具,把原始的tool10改为mytool。或者,在放入机器人时,即完成此项设置,可以 不需要修改此项。 一直选择下一个,即可成功。 成功后,屏幕右下角变为绿色。 5、选择建模,在菜单中选择固体,再选择矩形体。
一种单向伸缩式管道机器人系统的建模与仿真 一种单向伸缩式管道机器人系统的建模与仿真
格式:pdf
大小:874KB
页数:4P
4.5
介绍了基于单向运动机构的伸缩式管道机器人工作原理,对管道机器人整机系统进行合理简化,得到等效系统模型。根据等效模型,分析直流伺服电机、滚珠丝杠,以及单向运动机构的动力学行为。为了研究系统的输入电压信号和输出的运动速度之间的关系,建立了机器人系统的完整框图模型。利用matlab对机器人系统进行仿真,分析不同输入信号下系统的响应特性,为管道机器人的机构设计和控制器设计提供理论依据。
气压式仿人机器人的腰部设计与运动仿真 气压式仿人机器人的腰部设计与运动仿真
格式:pdf
大小:353KB
页数:未知
4.7
提出了一种新型的气压式仿人机器人腰部机构,它具有结构简单和运动稳定的特点。气压式仿人机器人腰部的运动受到手部、头部和腿部等关节力矩的影响。在对机器人进行简化之后,依据高效-欧拉算法,对该仿人机器人进行整体建模,导出腰部俯仰和侧转关节的动力学模型。从动力学上分析,机器人腰部手部和腿部的运动以及外力(矩)等的影响。在pro/e3.0上建立仿人机器人腰部结构模型,然后导入adams中进行动力学仿真研究,验证了该模型的正确性。
仿人按摩机器人手臂的直齿圆锥齿轮建模与运动学仿真 仿人按摩机器人手臂的直齿圆锥齿轮建模与运动学仿真
格式:pdf
大小:330KB
页数:3P
4.8
传动机构是仿人按摩机器人手臂的关键部分,结合仿人按摩机器人手臂的特点采用直齿圆锥齿轮传动方式,设计了仿人按摩机器人手臂的传动机构。运用solidworks三维建模软件,结合直齿圆锥齿轮齿廓渐开线方程,完成了直齿圆锥齿轮实体造型并实现了模型的参数化。利用adams软件对建立的直齿圆锥齿轮模型进行运动学仿真分析,为齿轮的设计改进以及间隙调整提供了参考依据。实践证明,solidworks与admas相结合的方法提高了齿轮的设计效率和传动精度。
旋转足式机器人步态控制器设计 旋转足式机器人步态控制器设计
格式:pdf
大小:262KB
页数:未知
4.4
为实现旋转足式机器人的步态控制,本文提供了基于freescalek60的一种相对易行的控制器设计方案。介绍了控制器任务调度方案、基本模块设计、步态算法设计,以及通讯方案。
l六足昆虫机器人机械原理
格式:pdf
大小:539KB
页数:5P
4.4
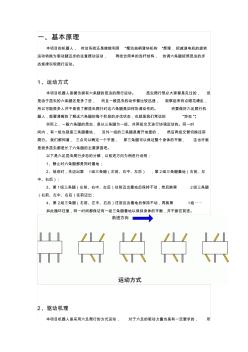
一、基本原理 本项目的机器人,传动系统还是继续利用“摆动曲柄滑块机构”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动,再结合简单的连杆结构,协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。昆虫爬行想必大家都是见过的,但 是由于昆虫的六条腿还是多了些,而且一般昆虫的动作都比较迅速,观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的“步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地,另外一组的三条腿是离开地面的,然后两组交替切换往前 爬行。我们都知道,三点可以确定一个平面,即三条腿可以保证整个身体的平衡,这
测量机器人用于超高层建筑竖向投测的可行性
格式:pdf
大小:169KB
页数:3P
4.4
第35卷第1期 2010年1月 测绘科学 scienceofsurveyingandmapping vol135no11 jan1 作者简介:蒋利龙(19612),男,湖南武 冈人,教授,主要从事大气折射理论与 应用、变形监测质量控制等方面的教学 与研究工作。 e2mail:jll3618@1631com 收稿日期:2008208226 测量机器人用于超高层建筑竖向投测的可行性 蒋利龙 (广东工业大学测绘工程系,广州 510006) 【摘 要】激光垂准仪法是超高层建筑竖向投测的主要方法之一。当建筑高度特别大时,楼体在日照等因素作用 下会产生缓慢的摆动,此时,激光垂准仪法的应用将受到一定限制。本文介绍一种利用测量机器人进行超高层建 筑竖向投测的方法,并分析其投测精度和可行性。 【关键词】超高层建筑
双足机器人上楼梯步态的规划与控制 双足机器人上楼梯步态的规划与控制
格式:pdf
大小:1.1MB
页数:5P
4.8
研究双足机器人上楼路径优化技术,为了让双足机器人实现稳定的上楼梯的行走,应规划双足机器人的上楼梯的步态。为解决对步态进行合理规划与稳定控制问题,提出用几何约束法,用摆线拟合踝关节运动轨迹,设计模糊控制器,对踝关节的滚转角度进行调整,使zmp位置靠近支撑区域中心,保证了机器人的稳定行走;最后在adams软件中建立了双足机器人的虚拟样机,并通过与matlab的联合仿真,实现了双足机器人上楼梯的稳定行走仿真。仿真结果验证了上楼梯步态与模糊控制器的有效性,为系统设计提供了保证。
基于STM32双足竞步机器人的研究与设计 基于STM32双足竞步机器人的研究与设计
格式:pdf
大小:148KB
页数:2P
4.6
随着科技的不断进步,智能机器人已逐步应用到各个生产领域,并促进机械、农业、家具等向智能化方向发展。为此,设计了双足竞步机器人。该机器人将先进的自动控制系统与机械设备的有效结合,并通过stm32单片机输出pwm波形来控制舵机运动,从而实现机器人的前进、后退、转弯等多个动作。而且本系统的功能还能延伸运用,可以很好地用于其它相关领域,具有一定的扩展应用价值和意义。
双电机驱动的六足直立式步行机器人的设计 双电机驱动的六足直立式步行机器人的设计
格式:pdf
大小:521KB
页数:未知
4.8
采用直立式腿部结构,以双电机为驱动力而设计开发了一种可调头拐弯的六足步行机器人;行走机构采用曲柄连杆机构为传动系统,能够实现前行、后退、左拐、右拐、原地调头或停止等动作.其简单巧妙的机械机构设计、动力传动方案和控制系统,为将来更完善的六足机器人设计、开发、不断拓展和深入研究提供了科学的依据.
ADAMS六足高层建筑清洁机器人的建模与仿真相关
文辑推荐
知识推荐
百科推荐


职位:建筑设计师
擅长专业:土建 安装 装饰 市政 园林


