can总线
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由以研发和生产汽车电子产品著称的德国BOSCH公司开发的,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。
can总线基本信息
| 中文名称 | CAN总线 | 外文名称 | Controller Area Network |
|---|---|---|---|
| 开发公司 | 德国BOSCH公司 | 特点 | 国际上应用最广泛的现场总线之一 |
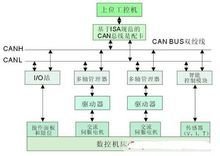
控制器局部网(CAN-CONTROLLER AREA NETWORK)是BOSCH公司为现代汽车应用领域推出的一种多主机局部网,由于其高性能、高可靠性、实时性等优点现已广泛应用于工业自动化、多种控制设备、交通工具、医疗仪器以及建筑、环境控制等众多部门。控制器局部网将在中国迅速普及推广。
随着计算机硬件、软件技术及集成电路技术的迅速发展,工业控制系统已成为计算机技术应用领域中最具活力的一个分支,并取得了巨大进步。由于对系统可靠性和灵活性的高要求,工业控制系统的发展主要表现为:控制面向多元化,系统面向分散化,即负载分散、功能分散、危险分散和地域分散。
分散式工业控制系统就是为适应这种需要而发展起来的。这类系统是以微型机为核心,将 5C技术--COMPUTER(计算机技术)、CONTROL(自动控制技术)、COMMUNICATION(通信技术)、CRT(显示技术)和 CHANGE(转换技术)紧密结合的产物。它在适应范围、可扩展性、可维护性以及抗故障能力等方面,较之分散型仪表控制系统和集中型计算机控制系统都具有明显的优越性。
典型的分散式控制系统由现场设备、接口与计算设备以及通信设备组成。现场总线(FIELDBUS)能同时满足过程控制和制造业自动化的需要,因而现场总线已成为工业数据总线领域中最为活跃的一个领域。现场总线的研究与应用已成为工业数据总线领域的热点。尽管对现场总线的研究尚未能提出一个完善的标准,但现场总线的高性能价格必将吸引众多工业控制系统采用。同时,正由于现场总线的标准尚未统一,也使得现场总线的应用得以不拘一格地发挥,并将为现场总线的完善提供更加丰富的依据。控制器局部网 CAN(CONTROLLER AERANETWORK)正是在这种背景下应运而生的。
由于CAN为愈来愈多不同领域采用和推广,导致要求各种应用领域通信报文的标准化。为此,1991年 9月 PHILIPS SEMICONDUCTORS制订并发布了 CAN技术规范(VERSION 2.0)。该技术规范包括A和B两部分。2.0A给出了曾在CAN技术规范版本1.2中定义的CAN报文格式,能提供11位地址;而2.0B给出了标准的和扩展的两种报文格式,提供29位地址。此后,1993年11月ISO正式颁布了道路交通运载工具--数字信息交换--高速通信控制器局部网(CAN)国际标准(ISO11898),为控制器局部网标准化、规范化推广铺平了道路。
can总线造价信息
位仲裁
要对数据进行实时处理,就必须将数据快速传送,这就要求数据的物理传输通路有较高的速度。在几个站同时需要发送数据时,要求快速地进行总线分配。实时处理通过网络交换的紧急数据有较大的不同。一个快速变化的物理量,如汽车引擎负载,将比类似汽车引擎温度这样相对变化较慢的物理量更频繁地传送数据并要求更短的延时。
CAN总线以报文为单位进行数据传送,报文的优先级结合在11位标识符中,具有最低二进制数的标识符有最高的优先级。这种优先级一旦在系统设计时被确立后就不能再被更改。总线读取中的冲突可通过位仲裁解决。如图2所示,当几个站同时发送报文时,站1的报文标识符为011111;站2的报文标识符为0100110;站3的报文标识符为0100111。所有标识符都有相同的两位01,直到第3位进行比较时,站1的报文被丢掉,因为它的第3位为高,而其它两个站的报文第3位为低。站2和站3报文的4、5、6位相同,直到第7位时,站3的报文才被丢失。注意,总线中的信号持续跟踪最后获得总线读取权的站的报文。在此例中,站2的报文被跟踪。这种非破坏性位仲裁方法的优点在于,在网络最终确定哪一个站的报文被传送以前,报文的起始部分已经在网络上传送了。所有未获得总线读取权的站都成为具有最高优先权报文的接收站,并且不会在总线再次空闲前发送报文。
CAN具有较高的效率是因为总线仅仅被那些请求总线悬而未决的站利用,这些请求是根据报文在整个系统中的重要性按顺序处理的。这种方法在网络负载较重时有很多优点,因为总线读取的优先级已被按顺序放在每个报文中了,这可以保证在实时系统中较低的个体隐伏时间。
对于主站的可靠性,由于CAN协议执行非集中化总线控制,所有主要通信,包括总线读取 (许可)控制,在系统中分几次完成。这是实现有较高可靠性的通信系统的唯一方法。
CAN与其它通信方案的比较
在实践中,有两种重要的总线分配方法:按时间表分配和按需要分配。在第一种方法中,不管每个节点是否申请总线,都对每个节点按最大期间分配。由此,总线可被分配给每个站并且是唯一的站,而不论其是立即进行总线存取或在一特定时间进行总线存取。这将保证在总线存取时有明确的总线分配。在第二种方法中,总线按传送数据的基本要求分配给一个站,总线系统按站希望的传送分配(如:EthernetCSMA/CD)。因此,当多个站同时请求总线存取时,总线将终止所有站的请求,这时将不会有任何一个站获得总线分配。为了分配总线,多于一个总线存取是必要的。
CAN实现总线分配的方法,可保证当不同的站申请总线存取时,明确地进行总线分配。这种位仲裁的方法可以解决当两个站同时发送数据时产生的碰撞问题。不同于Ethernet网络的消息仲裁,CAN的非破坏性解决总线存取冲突的方法,确保在不传送有用消息时总线不被占用。甚至当总线在重负载情况下,以消息内容为优先的总线存取也被证明是一种有效的系统。虽然总线的传输能力不足,所有未解决的传输请求都按重要性顺序来处理。在CSMA/CD这样的网络中,如Ethernet,系统往往由于过载而崩溃,而这种情况在CAN中不会发生。
CAN的报文格式
在总线中传送的报文,每帧由7部分组成。CAN协议支持两种报文格式,其唯一的不同是标识符(ID)长度不同,标准格式为11位,扩展格式为29位。
在标准格式中,报文的起始位称为帧起始(SOF),然后是由11位标识符和远程发送请求位 (RTR)组成的仲裁场。RTR位标明是数据帧还是请求帧,在请求帧中没有数据字节。
控制场包括标识符扩展位(IDE),指出是标准格式还是扩展格式。它还包括一个保留位 (ro),为将来扩展使用。它的最后四个位用来指明数据场中数据的长度(DLC)。数据场范围为0~8个字节,其后有一个检测数据错误的循环冗余检查(CRC)。
应答场(ACK)包括应答位和应答分隔符。发送站发送的这两位均为隐性电平(逻辑1),这时正确接收报文的接收站发送主控电平(逻辑0)覆盖它。用这种方法,发送站可以保证网络中至少有一个站能正确接收到报文。
报文的尾部由帧结束标出。在相邻的两条报文间有一很短的间隔位,如果这时没有站进行总线存取,总线将处于空闲状态。
CAN数据帧的组成
远程帧
远程帧由6个场组成:帧起始、仲裁场、控制场、CRC场、应答场和帧结束。远程帧不存在数据场。
远程帧的RTR位必须是隐位。
DLC的数据值是独立的,它可以是0~8中的任何数值,为对应数据帧的数据长度。
错误帧
错误帧由两个不同场组成,第一个场由来自各站的错误标志叠加得到,第二个场是错误界定符
错误标志具有两种形式:
活动错误标志(Active error flag),由6个连续的显位组成
认可错误标志(Passive error flag),由6个连续的隐位组成
错误界定符包括8个隐位
超载帧
超载帧包括两个位场:超载标志和超载界定符
发送超载帧的超载条件:
要求延迟下一个数据帧或远程帧
在间歇场检测到显位
超载标志由6个显位组成
超载界定符由8个隐位组成
数据错误检测
不同于其它总线,CAN协议不能使用应答信息。事实上,它可以将发生的任何错误用信号发出。CAN协议可使用五种检查错误的方法,其中前三种为基于报文内容检查。
3.4.1循环冗余检查(CRC)
在一帧报文中加入冗余检查位可保证报文正确。接收站通过CRC可判断报文是否有错。
3.4.2 帧检查
这种方法通过位场检查帧的格式和大小来确定报文的正确性,用于检查格式上的错误。
3.4.3.应答错误
如前所述,被接收到的帧由接收站通过明确的应答来确认。如果发送站未收到应答,那么表明接收站发现帧中有错误,也就是说,ACK场已损坏或网络中的报文无站接收。CAN协议也可通过位检查的方法探测错误。
3.4.4 总线检测
有时,CAN中的一个节点可监测自己发出的信号。因此,发送报文的站可以观测总线电平并探测发送位和接收位的差异。
3.4.5 位填充
一帧报文中的每一位都由不归零码表示,可保证位编码的最大效率。然而,如果在一帧报文中有太多相同电平的位,就有可能失去同步。为保证同步,同步沿用位填充产生。在五个连续相等位后,发送站自动插入一个与之互补的补码位;接收时,这个填充位被自动丢掉。例如,五个连续的低电平位后,CAN自动插入一个高电平位。CAN通过这种编码规则检查错误,如果在一帧报文中有6个相同位,CAN就知道发生了错误。
如果至少有一个站通过以上方法探测到 一个或多个错误,它将发送出错标志终止当前的发送。这可以阻止其它站接收错误的报文,并保证网络上报文的一致性。当大量发送数据被终止后,发送站会自动地重新发送数据。作为规则,在探测到错误后23个位周期内重新开始发送。在特殊场合,系统的恢复时间为31个位周期。
但这种方法存在一个问题,即一个发生错误的站将导致所有数据被终止,其中也包括正确的数据。因此,如果不采取自监测措施,总线系统应采用模块化设计。为此,CAN协议提供一种将偶然错误从永久错误和局部站失败中区别出来的办法。这种方法可以通过对出错站统计评估来确定一个站本身的错误并进入一种不会对其它站产生不良影响的运行方法来实现,即站可以通过关闭自己来阻止正常数据因被错误地当成不正确的数据而被终止。
硬同步和重同步
硬同步只有在总线空闲状态条件下隐形位到显性位的跳变沿发生时才进行,表明报文传输开始。在硬同步之后,位时间计数器随同步段重新开始计数。硬同步强行将已发生的跳变沿置于重新开始的位时间同步段内。根据同步规则,如果某一位时间内已有一个硬同步出现,该位时间内将不会发生再同步。再同步可能导致相位缓冲段1被延长或相位缓冲段2被短。这两个相位缓冲段的延长时间或缩短时间上限由再同步跳转宽度(SJW)给定。
CAN总线是德国BOSCH公司从80年代初为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议,它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维。通信速率最高可达1Mbps。
完成对通信数据的成帧处理
CAN总线通信接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
使网络内的节点个数在理论上不受限制
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点可使网络内的节点个数在理论上不受限制,数据块的标识符可由11位或29位二进制数组成,因此可以定义2或2个以上不同的数据块,这种按数据块编码的方式,还可使不同的节点同时接收到相同的数据,这一点在分布式控制系统中非常有用。数据段长度最多为8个字节,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。CAN卓越的特性、极高的可靠性和独特的设计,特别适合工业过程监控设备的互连,因此,越来越受到工业界的重视,并已公认为最有前途的现场总线之一。
可在各节点之间实现自由通信
CAN总线采用了多主竞争式总线结构,具有多主站运行和分散仲裁的串行总线以及广播通信的特点。CAN总线上任意节点可在任意时刻主动地向网络上其它节点发送信息而不分主次,因此可在各节点之间实现自由通信。CAN总线协议已被国际标准化组织认证,技术比较成熟,控制的芯片已经商品化,性价比高,特别适用于分布式测控系统之间的数据通讯。CAN总线插卡可以任意插在PC AT XT兼容机上,方便地构成分布式监控系统。
结构简单
只有2根线与外部相连,并且内部集成了错误探测和管理模块。
传输距离和速率
CAN总线特点:(1) 数据通信没有主从之分,任意一个节点可以向任何其他(一个或多个)节点发起数据通信,靠各个节点信息优先级先后顺序来决定通信次序,高优先级节点信息在134μs通信; (2) 多个节点同时发起通信时,优先级低的避让优先级高的,不会对通信线路造成拥塞; (3) 通信距离最远可达10KM(速率低于5Kbps)速率可达到1Mbps(通信距离小于40M);(4) CAN总线传输介质可以是双绞线,同轴电缆。CAN总线适用于大数据量短距离通信或者长距离小数据量,实时性要求比较高,多主多从或者各个节点平等的现场中使用。
can总线常见问题
-
我来回答你吧同一个网路内的节点是通过can总线直接通讯,他们的速率必须一致,因为不同速率下的位时间宽度、时间份额都是不一样的,通俗点讲速率不同,a节点认为的一个位,在b节点看来就不是一个位了,这样如何...
-
如果你是用CAN控制器的,就需要查控制器中发送缓冲区是否为空,一旦为空,就是已经成功发送,否则就可能是在发送或者重发中。这时你要做超时处理,比如周立功的设备一般都是设置1.6S为超时时间,一旦发送缓冲...
-
CAN总线利用两条铜做的导线,CAN高线和CAN低线,广成科技发现它能将汽车仪表、ECU、控制模块、变速箱、辅助刹车系统、各种传感器和开关像修建高速公路一样连在一起,实现信息的实时同步,汽车的各项数据...

can总线基本概念
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。在汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应"减少线束的数量"、"通过多个LAN,进行大量数据的高速通信"的需要,1986 年德国电气商博世公司开发出面向汽车的CAN 通信协议。此后,CAN 通过ISO11898 及ISO11519 进行了标准化,在欧洲已是汽车网络的标准协议。
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。
为防止汽车在使用寿命期内由于数据交换错误而对司机造成危险,汽车的安全系统要求数据传输具有较高的安全性。如果数据传输的可靠性足够高,或者残留下来的数据错误足够低的话,这一目标不难实现。从总线系统数据的角度看,可靠性可以理解为,对传输过程产生的数据错误的识别能力。
残余数据错误的概率可以通过对数据传输可靠性的统计测量获得。它描述了传送数据被破坏和这种破坏不能被探测出来的概率。残余数据错误概率必须非常小,使其在系统整个寿命周期内,按平均统计时几乎检测不到。计算残余错误概率要求能够对数据错误进行分类,并且数据传输路径可由一模型描述。如果要确定CAN的残余错误概率,我们可将残留错误的概率作为具有80~90位的报文传送时位错误概率的函数,并假定这个系统中有5~10个站,并且错误率为1/1000,那么最大位错误概率为10-13数量级。例如,CAN网络的数据传输率最大为1Mbps,如果数据传输能力仅使用50%,那么对于一个工作寿命4000小时、平均报文长度为 80位的系统,所传送的数据总量为9×1010。在系统运行寿命期内,不可检测的传输错误的统计平均小于10-2量级。换句话说,一个系统按每年365天,每天工作8小时,每秒错误率为0. 7计算,那么按统计平均,每1000年才会发生一个不可检测的错误。
废除传统的站地址编码,代之以对通信数据块进行编码,可以多主方式工作;
采用非破坏性仲裁技术,当两个节点同时向网络上传送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响继续传输数据,有效避免了总线冲突;
采用短帧结构,每一帧的有效字节数为8个,数据传输时间短,受干扰的概率低,重新发送的时间短;
每帧数据都有CRC校验及其他检错措施,保证了数据传输的高可靠性,适于在高干扰环境下使用;
节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上其他操作不受影响;
可以点对点,一对多及广播集中方式传送和接受数据。
具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
具有优先权和仲裁功能,多个控制模块通过CAN控制器挂到CAN-Bus上,形成多主机局部网络;
可根据报文的ID决定接收或屏蔽该报文;
可靠的错误处理和检错机制;
发送的信息遭到破坏后,可自动重发;
节点在错误严重的情况下具有自动退出总线的功能;
报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
CAN总线在工控领域主要使用低速-容错CAN即ISO11898-3标准,在汽车领域常使用500Kbps的高速CAN。
某进口车型拥有,车身、舒适、多媒体等多个控制网络,其中车身控制使用CAN网络,舒适使用LIN网络,多媒体使用MOST网络,以CAN网为主网,控制发动机、变速箱、ABS等车身安全模块,并将转速、车速、油温等共享至全车,实现汽车智能化控制,如高速时自动锁闭车门,安全气囊弹出时,自动开启车门等功能。
CAN系统又分为高速和低速,高速CAN系统采用硬线是动力型,速度:500kbps,控制ECU、ABS等;低速CAN是舒适型,速度:125Kbps,主要控制仪表、防盗等。
某医院现有5台16T/H XXXX燃气锅炉,向洗衣房、制剂室、供应室、生活用水、暖气等设施提供5kg/cm2的蒸汽,全年耗用天然气1200万m3,耗用20万吨自来水。医院采用接力式方式供热,对热网进行地域性管理,分四大供热区。其中冬季暖气的用气量很大,据此设计了基于CAN现场总线的分布式锅炉蒸汽热网智能监控系统。现场应用表明:该楼宇自动化系统具有抗干扰能力强,现场组态容易,网络化程度高,人机界面友好等特点。
can总线测试工具
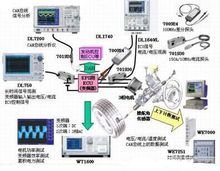
CAN总线多用于工控和汽车领域,在CAN总线的开发测试阶段,需要对其拓扑结构,节点功能,网路整合等进行开发测试,需要虚拟、半虚拟、全实物仿真测试平台,并且必须测试各节点是否符合ISO11898中规定的错误响应机制等,所以CAN总线的开发需要专业的开发测试工具,并且在生产阶段也需要一批简单易用的生产线测试工具。CAN总线开发测试工具的主要供应商有ZLG、Passion IXXAT、IHR、Vector、Intrepidcs、Passion Warwick、LAIKE等。常用的开发测试工具如CANScope、CANalyst-II、Passiontech DiagRA、canAnalyser、X-Analyser、AutoCAN、CANspider,LAIKE CANTest等。
错误处理
在CAN总线中存在5种错误类型,它们互相并不排斥,下面简单介绍一下它们的区别、产生的原因及处理方法。
位错误:向总线送出一位的某个节点同时也在监视总线,当监视到总线位的电平和送出的电平不同时,则在该位时刻检测到一个位错误。但是在仲裁区的填充位流期间或应答间隙送出隐性位而检测到显性位时,不认为是错误位。送出认可错误标注的发送器,在检测到显性位时也不认为是错误位。
填充错误:在使用位填充方法进行编码的报文中,出现了第6个连续相同的位电平时,将检 测出一个填充错误。
CRC错误:CRC序列是由发送器CRC计算的结果组成的。接收器以和发送器相同的方法计算CRC。如果计算的结果和接收到的CRC序列不同,则检测出一个CRC错误。
形式错误: 当固定形式的位区中出现一个或多个非法位时,则检测到一个形式错误。
应答错误:在应答间隙,发送器未检测到显性位时,则由它检测出一个应答错误。
检测到出错条件的节点通过发送错误标志进行标定。当任何节点检测出位错误、填充错误、形式错误或应答错误时,由该节点在下一位开始发送出错误标志。
当检测到CRC错误时。出错标志在应答界定符后面那一位开始发送.除非其他出错条件的错误标志已经开始发送。
在CAN总线中,任何一个单元可能处于下列3种故障状态之一:错误激活状态(ErrorActive)、错误认可状态(Error Passitive)和总线关闭状态(Bus off)。
错误激活单元可以照常参和总线通信,并且当检测到错误时,送出一个活动错误标志。错误 认可节点可参和总线通信,但是不允许送出活动错误标志。当其检测到错误时,只能送出认可错 误标志,并且发送后仍为错误认可状态,直到下一次发送初始化。总线关闭状态不允许单元对总 线有任何影响。
为了界定故障,在每个总线单元中都设有2个计数:发送出错计数和接收出错计数。这些 计数按照下列规则进行。
(1)接收器检查出错误时,接收器错误计数器加1,除非所有检测错误是发送活动错误标志或超载标志期间的位错误。
(2)接收器在送出错误标志后的第一位检查出显性位时,错误计数器加8。
(3)发送器送出一个错误标志时,发送器错误计数器加8。有两种情况例外:其一是如果发 送器为错误认可,由于未检测到显性位应答或检测到应答错误,并且在送出其认可错误标志时,未检测到显性位;另外一种情况是如果仲裁器件产生填充错误,发送器送出一个隐性位错误标志,而检测到的是显性位。除以上两种情况外,发送器错误计数器计数不改变。
(4)发送器送出一个活动错误标志或超载标志时,检测到位错误,则发送器错误计数器加8。
(5)在送出活动错误标志、认可错误标志或超载错误标志后,任何节点都最多允许连续7个显性位。在检测到第11个连续显性位后,或紧随认可错误标志检测到第8个连续的显性位,以及附加的8个连续的显性位的每个序列后,每个发送器的发送错误计数都加8,并且每个接收器的接收错误计数也加8。
(6)报文成功发送后,发送错误计数减1,除非计数值已经为0。
(7)报文成功发送后,如果接收错误计数处于1~197之间,则其值减1;如果接收错误计数为0,则仍保持为0;如果大于127,则将其值记为119~127之间的某个数值。
(8)当发送错误计数等于或大于128,或接收错误计数等于或大于128时,节点进入错误认,可状态,节点送出一个活动错误标志。
(9)当发送错误计数器大于或等于256时,节点进入总线关闭状态。
(1O)当发送错误计数和接收错误计数均小于或等于127时,错误认可节点再次变为错误激活节点。
(11)在检测到总线上11个连续的隐性位发送128次后,总线关闭节点将变为2个错误计数器均为0的错误激活节点。
(12)当错误计数器数值大于96时,说明总线被严重干扰。
如果系统启动期间仅有1个节点挂在总线上,此节点发出报文后,将得不到应答,检查出错误并重复该报文,此时该节点可以变为错误认可节点,但不会因此关闭总线。\
CAN总线的应用
1、汽车制造中的应用
应用CAN总线,可以减少车身布线,进一步节省了成本,由于采用总线技术,模块之间的信号传递仅需要两条信号线。布线局部化,车上除掉总线外其他所有横贯车身的线都不再需要了,节省了布线成本。CAN总线系统数据稳定可靠,CAN总线具有线间干扰小、抗干扰能力强的特点。CAN总线专为汽车量身定做,充分考虑到了汽车上恶劣工作环境,比如点火线圈点火时产生的强大的反充电压,电涡流缓冲器切断时产生的浪涌电流及汽车发动机仓100℃左右的高温。
随着安全性能日益受到重视,安全气囊也将逐渐增多,以前是在驾驶员前面安装一个,今后侧面与后座都会安装安全气囊,这些气囊通过传感器感受碰撞信号,通过 CAN总线将传感器信号传送到一个中央处理器内,控制各安全气囊的启动弹出动作。同时,先进的防盗设计也正基于CAN总线网络技术。首先,确认钥匙合法性的校验信息通过CAN网络进行传递,改进了加密算法,其校验的信息比以往的防盗系统更丰富;其次,车钥匙、防盗控制器和发动机控制器相互储存对方信息,而且在校验码中搀杂随机码,无法进行破译,从而提高防盗系统的安全性。而这些功能的实现无一不借助CAN总线来完成,CAN总线成为汽车智能化控制的"定海神针"。
在现代轿车的设计中,CAN已经成为必须采用的装置。奔驰、宝马、大众、沃尔沃、雷诺等汽车都采用了CAN作为控制器联网的手段。据报道,中国首辆CAN 网络系统混合动力轿车已在奇瑞公司试装成功,并进行了初步试运行。在上海大众的帕萨特和POLO汽车上也开始引入了CAN总线技术。但总的来说,目前 CAN总线技术在我国汽车工业中的应用尚处于试验和起步阶段,绝大部分的汽车还没有采用汽车总线设计。国内在技术、设计和应用上进行网络总线的"深造"势在必行。
2、大型仪器设备中的应用
大型仪器设备是一种参照一定步骤对多种信息采集、处理、控制、输出等操作的复杂系统。过去这类仪器设备的电子系统往往是在结构和成本方面占据相当大的部分,而且可靠性不高。采用CAN总线技术后,在这方面有了明显改观。
以医疗设备为例,病理分布式监控系统分别由中央控制式的中央监控单元和现场采集单元。 现场采集单元对医院各室诊断测量仪器进行数据、图像的实时采集,同时完成数据统计、存贮; 中央监控单元可以定期或不定期地从现场采集单元获取数据并完成图像监测、数据统计、报表、打印及数据库管理。中央监控单元和现场采集单元之间通过CAN总线连接在一起,在这个网络中,中央监控单元处于主控位置,而现场采集单元可以随时响应中央监控单元的命令。其现场采集单元由单片机8C552及采集、存储、显示、遥控和通信模块组成,每个现场采集单元可与10个测量仪器相接。
Can总线是针对测控领域设计的,所以一次传输的报文量很小,一次报文量最大能够承载的数据上限为8字节,这种小数据量的传输一方面能够使得低优先级事务的传输,另一方面也非常符合测控需求。针对can总线技术的诸多优点,非常适合应用于大型仪器系统模块化之间的互相通信,采用模块化组网的方式构建大型仪器系统。
3、工业控制中的应用
随着计算机技术、通信技术和控制技术的发展,传统的工业控制领域正经历着一场前所未有的变革,而工业控制的网络化,更拓展了工业控制领域的发展空间,带来新的发展机遇。在广泛的工业领域,CAN总线可作为现场设备级的通信总线,而且与其他的总线相比,具有很高的可靠性和性能价格比。这将是CAN技术开发应用的一个主要的方向。
例如,瑞士一家公司开发的轴控制系统ACS-E就带有CAN接口。该系统可作为工业控制网络中的一个从站,用于控制机床、机器人等。一方面通过CAN总线上上位机通信,另一方面可通过CAN总线对数字式伺服电机进行控制。通过CAN总线最多可连接6台数字式伺服电机。
目前CAN总线技术在工程机械上的应用越来越普遍。国际上一些著名的工程机械大公司如CAT、VOLVO、利勃、海尔等都在自己的产品上广泛采用CAN总线技术,大大提高了整机的可靠性、可检测和可维修性,同时提高了智能化水平。而在国内,CAN总线控制系统也开始在工程汽车的控制系统中广泛应用,在工程机械行业中也正在逐步推广应用。
4、智能家庭和生活小区管理中的应用
小区智能化是一个综合性系统工程,要从其功能、性能、成本、扩充能力及现代相关技术的应用等多方面来考虑。基于这样的需求,采用CAN技术所设计的家庭智能管理系统比较适合用于多表远传、防盗、防火、防可燃气体泄漏、紧急救援、家电控制等方面。
CAN总线是小区管理系统的一部分,负责将家庭中的一些数据和信号收集起来,并送到小区管理中心处理,CAN总线上的节点是每户的家庭控制器、小区的三表抄收系统和报警监测系统,每户的家庭控制系统可通过总线发送报警信号,定期向自动抄表系统发送三表数据,并接收小区管理系统的通告信息,如欠费通知、火警警报等。
该系统充分利用CAN技术的特点和优势,构成住宅小区智能化检测系统,系统集多表集抄、防盗报警、水电控制、紧急求助、煤气泄漏报警、火灾报警和供电监控子系统等功能,并提供远程通讯服务。
5、机器人网络互联中的应用
制造车间底层设备自动化,近几年仍是我国开展新技术研究和新技术应用工程及产品开发的主要领域,其市场需求不断增大且越发活跃,竞争也日益激烈。伴随着工业机器人的产业化,目前机器人系统的应用大多要求采用机器人生产方式,这就要求多台机器人能通过网络进行互联。随之而来的是,在实际生产过程中,这种连网的多机器人系统的调度、维护工作也变得尤为重要。制造车间底层电气装置联网是近几年内技术发展的重点。其电器装置包括有:运动控制器、基于微处理器的传感器、专用设备控制器等底层设备;在这些装置所构成的网络上另有车间级管理机、监控机或生产单元控制器等非底层装置。结合实际情况和要求,将机器人控制器视为运动控制器。
把CAN总线技术充分应用于现有的控制器当中,将可开发出高性能的多机器人生产线系统。利用现有的控制技术,结合CAN技术和通信技术,通过对现有的机器人控制器进行硬件改进和软件开发,并相应地开发出上位机监控软件,从而实现多台机器人的网络互联。最终实现基于CAN网络的机器人生产线集成系统。这样做的好处很多,例如实现单根电缆串接全部设备,节省安装维护开销;提高实时性,信息可共享;提高多控制器系统的检测、诊断和控制性能;通过离线的任务调度、作业的下载以及错误监控等技术,把一部分人从机器人工作的现场彻底脱离出来。
CAN总线的数据通信具有突出的可靠性、实时性和灵活性。由于其良好的性能及独特的设计,CAN总线越来越受到人们的重视,它在汽车领域上的应用是最广泛的。世界上一些著名的汽车制造厂商大都采用了CAN总线来实现汽车内部控制系统与各检测和执行机构间的数据通信。同时,由于CAN总线本身的特点,其应用范围目前已不再局限于汽车行业,而向自动控制、航空航天、航海、过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域发展。CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。
can总线文献

 光纤CAN总线集线器及其组网研究
光纤CAN总线集线器及其组网研究
目前国际上还没有以光纤为传输介质的CAN总线物理层标准。提出了一种以光纤为传输介质的CAN总线集线器和基于该集线器的组网方法(已申请专利)。在总结了双绞线介质CAN总线物理层3个特点的基础上,详细讨论了该集线器的工作原理和设计方法。集线器采用了可编程逻辑器件的逻辑"与"替代双绞线CAN的"线与",并将"与"后的信号回传实现了所有节点对总线状态的监听功能,确保了所构造的光纤CAN总线网络在物理层之上与现有的CAN总线标准完全兼容。还介绍了光纤CAN总线集线器的级联扩展方法和与双绞线CAN总线子网的连接方法。实际设计了一个八口的集线器,初步的通信测试验证了方案的正确性和实用性。研究的结果对CAN总线新标准的提出有非常积极的意义。
 CAN总线在楼宇空调控制系统中的应用
CAN总线在楼宇空调控制系统中的应用
本文介绍一种基于CAN总线的楼宇空调控制系统。PC机适配卡设计,以及智能控制单元的设计原理。
第1章CAN总线概述与协议规范
1.1 计算机网络体系结构与拓扑结构
1.1.1 计算机网络体系结构
1.1.2 网络互联设备
1.1.3 网络拓扑结构
1.2 CAN总线简介
1.2.1 CAN总线是什么
1.2.2 CAN总线的特点
1.2.3 CAN总线传输介质
1.2.4 CAN总线拓扑结构与设备
1.3 报文传输
1.3.1 帧类型
1.3.2 帧格式
1.3.3 帧优先级仲裁
1.4 报文滤波与校验
1.5 编码--位填充
1.6 错误处理与故障界定
1.6.1 错误类型
1.6.2 节点错误处理
1.6.3 故障界定方法
1.7 位定时要求
本章小结
第2章CAN总线应用层协议
2.1 为什么构建CAN应用层协议
……第3章 CAN控制器和驱动器第4章 硬件系统设计与实践第5章 基础实验实践第6章 CAN总线节点的自收发实例设计第7章 CAN总线两节点通信实例设计第8章 CAN-RS232网桥设计第9章 基于iCAN协议的温控系统设计第10章 感悟设计附录 邮政系统与CAN总线通信系统对比后记
CAN总线的物理层是将ECU连接至总线的驱动电路。ECU的总数将受限于总线上的电气负荷。物理层定义了物理数据在总线上各节点间的传输过程,主要是连接介质、线路电气特性、数据的编码/解码、位定时和同步的实施标准。
总线竞争的原则
BOSCH CAN基本上没有对物理层进行定义,但基于CAN的ISO标准对物理层进行了定义。设计一个CAN系统时,物理层具有很大的选择余地,但必须保证CAN协议中媒体访问层非破坏性位仲裁的要求,即出现总线竞争时,具有较高优先权的报文获取总线竞争的原则,所以要求物理层必须支持CAN总线中隐性位和显性位的状态特征。在没有发送显性位时,总线处于隐性状态,空闲时,总线处于隐性状态;当有一个或多个节点发送显性位,显性位覆盖隐性位,使总线处于显性状态。
在此基础上,物理层主要取决于传输速度的要求。从物理结构上看,CAN节点的构成如图7-8所示。在CAN中,物理层从结构上可分为三层:分别是物理信号层(Physical Layer Signaling,PLS)、物理介质附件(Physical MediaAttachment,PMA)层和介质从属接口(Media Dependent:Inter-face,MDI)层。其中PLS连同数据链路层功能由CAN控制器完成,PMA层功能由CAN收发器完成,MDI层定义了电缆和连接器的特性。目前也有支持CAN的微处理器内部集成了CAN控制器和收发器电路,如MC68HC908GZl6。PMA和MDI两层有很多不同的国际或国家或行业标准,也可自行定义,比较流行的是ISOll898定义的高速CAN发送/接收器标准。
节点数量
CAN网络上的节点不分主从,任一节点均可在任意时刻主动地向网络上其他节点发送信息,通信方式灵活,利用这一特点可方便地构成多机备份系统,CAN只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据,无需专门的"调度"。 CAN的直接通信距离最远可达10km(速率5kbps以下);通信速率最高可达1Mbps(此时通信距离最长为40m)。 CAN上的节点数主要决定于总线驱动电路,目前可达110个;报文标识符可达2032种(CAN2.0A),而扩展标准(CAN2.0B)的报文标识符几乎不受限制。
CAN的数据链路层
CAN的数据链路层是其核心内容,其中逻辑链路控制(Logical Link control,LLC)完成过滤、过载通知和管理恢复等功能,媒体访问控制(Medium Access control,MAC)子层完成数据打包/解包、帧编码、媒体访问管理、错误检测、错误信令、应答、串并转换等功能。这些功能都是围绕信息帧传送过程展开的。
CAN总线发展
控制器局域网CAN( Controller Area Network)属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。是由德国博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。由于其高性能、高可靠性以及独特的设计而越来越受到人们的重视,被广泛应用于诸多领域。而且能够检测出产生的任何错误。当信号传输距离达到10km时,CAN仍可提供高达50kbit/s的数据传输速率。由于CAN总线具有很高的实时性能和应用范围,从位速率最高可达1Mbps的高速网络到低成本多线路的50Kbps网络都可以任意搭配。因此,CAN己经在汽车业、航空业、工业控制、安全防护等领域中得到了广泛应用。
随着CAN总线在各个行业和领域的广泛应用,对其的通信格式标准化也提出了更严格的要求。1991年CAN总线技术规范(Version2.0)制定并发布。该技术规范共包括A和B两个部分。其中2.0A给出了CAN报文标准格式,而2.0B给出了标准的和扩展的两种格式。美国的汽车工程学会SAE在2000年提出了J1939协议,此后该协议成为了货车和客车中控制器局域网的通用标准。CAN总线技术也在不断发展。传统的CAN是基于事件触发的,信息传输时间的不确定性和优先级反转是它固有的缺陷。当总线上传输消息密度较小时,这些缺陷对系统的实时性影响较小;但随着在总线上传输消息密度的增加,系统实时性能会急剧下降。为了满足汽车控制对实时性和传输消息密度不断增长的需要,改善CAN总线的实时性能非常必要。于是,传统CAN与时间触发机制相结合产生了TTCAN(Time-Triggered CAN),ISO11898-4己包含了TTCAN。 TTCAN总线和传统CAN总线系统的区别是:总线上不同的消息定义了不同的时间槽(Timer Slot)。
相关组织
依据国际标准化组织/开放系统互连(International Standardi-zation Organization/Open SystemInterconnection,ISO/OSI)参考模型,CAN的ISO/OSI参考模型的层结构。
概念和特征
CAN总线的工作原理
CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。CAN与I2C总线的许多细节很类似,但也有一些明显的区别。当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。
当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器都有自己独立的传感器。
CAN总线特征
(1)报文(Message)总线上的数据以不同报文格式发送,但长度受到限制。当总线空闲时,任何一个网络上的节点都可以发送报文。
(2)信息路由(Information Routing)在CAN中,节点不使用任何关于系统配置的报文,比如站地址,由接收节点根据报文本身特征判断是否接收这帧信息。因此系统扩展时,不用对应用层以及任何节点的软件和硬件作改变,可以直接在CAN中增加节点。
(3)标识符(Identifier) 要传送的报文有特征标识符(是数据帧和远程帧的一个域),它给出的不是目标节点地址,而是这个报文本身的特征。信息以广播方式在网络上发送,所有节点都可以接收到。节点通过标识符判定是否接收这帧信息。
(4)数据一致性应确保报文在CAN里同时被所有节点接收或同时不接收,这是配合错误处理和再同步功能实现的。
(5)位传输速率不同的CAN系统速度不同,但在一个给定的系统里,位传输速率是唯一的,并且是固定的。
(6)优先权 由发送数据的报文中的标识符决定报文占用总线的优先权。标识符越小,优先权越高。
(7)远程数据请求(Remote Data Request) 通过发送远程帧,需要数据的节点请求另一节点发送相应的数据。回应节点传送的数据帧与请求数据的远程帧由相同的标识符命名。
(8)仲裁(Arbitration) 只要总线空闲,任何节点都可以向总线发送报文。如果有两个或两个以上的节点同时发送报文,就会引起总线访问碰撞。通过使用标识符的逐位仲裁可以解决这个碰撞。仲裁的机制确保了报文和时间均不损失。当具有相同标识符的数据帧和远程帧同时发送时,数据帧优先于远程帧。在仲裁期间,每一个发送器都对发送位的电平与被监控的总线电平进行比较。如果电平相同,则这个单元可以继续发送,如果发送的是"隐性"电平而监视到的是"显性"电平,那么这个单元就失去了仲裁,必须退出发送状态。
(9)总线状态 总线有"显性"和"隐性"两个状态,"显性"对应逻辑"0","隐性"对应逻辑"1"。"显性"状态和"隐性"状态与为"显性"状态,所以两个节点同时分别发送"0"和"1"时,总线上呈现"0"。CAN总线采用二进制不归零(NRZ)编码方式,所以总线上不是"0",就是"1"。但是CAN协议并没有具体定义这两种状态的具体实现方式。
(10)故障界定(Confinement) CAN节点能区分瞬时扰动引起的故障和永久性故障。故障节点会被关闭。
(11)应答接收节点对正确接收的报文给出应答,对不一致报文进行标记。
(12)CAN通讯距离最大是10公里(设速率为5Kbps),或最大通信速率为1Mbps(设通信距离为40米)。
(13)CAN总线上的节点数可达110个。通信介质可在双绞线,同轴电缆,光纤中选择。
(14)报文是短帧结构,短的传送时间使其受干扰概率低,CAN有很好的校验机制,这些都保证了CAN通信的可靠性。
CAN总线的特点
(1)具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;
(2)采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作;
(3)具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;
(4)可根据报文的ID决定接收或屏蔽该报文;
(5)可靠的错误处理和检错机制;
(6)发送的信息遭到破坏后,可自动重发;
(7)节点在错误严重的情况下具有自动退出总线的功能;
(8)报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
can总线相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 现场总线
- SM总线控制器
- 普通光学显微镜
- 座厕板开合机构
- 铝合金车体焊接工艺
- PCI总线:PCI(PeripheralComponentInterconnect:外部设备互连)
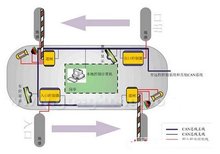
- 停车场收费系统
- 票箱
- 现场总线控制网络技术
- 停车场收费管理系统
- 冲压弯头材料
- Std总线
- 排气管
- 隔断
- 皮带运输机
- 饮水机
- 简单实用的RS-485总线光电隔离中继器设计
- 基于CAN总线数控系统远程输入输出模块设计与实现
- 基于CAN总线新型LED信号机状态在线检测设计
- 基于CAN总线和AVR单片机步进电机控制模块设计
- 基于C8051F040和CAN总线液位控制器设计
- 基于RS485总线技术PC机与单片机多机通讯设计
- 基于RS-485总线主从分布式电阻炉温度群控系统
- 基于Wolfson音频SoCI~2C总线接口设计
- 基于LabVIEWCAN总线通信系统设计与实现
- 基于C8051F040CAN总线中继器设计与实现
- 基于DSP和FPGA油田测井系统总线通信接口设计
- 基于CAN总线VDR系统容错主控制器设计与实现
- 基于RS485总线煤矿井下粉尘浓度监测系统设计
- 嵌入式Win CE中CAN总线控制器的驱动设计与实现
- Controlnet总线技术在水电站综合自动化中的应用
- 现场总线控制系统实际微分PID控制器的设计
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
拆边机
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
四川中泽盛世招标代理有限公司