



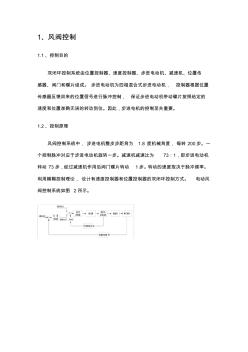
1、风阀控制 1.1、控制目的 双闭环控制系统由位置控制器、速度控制器、步进电动机、减速机、位置传 感器、阀门和碟片组成。 步进电动机为四相混合式步进电动机, 控制器根据位置 传感器反馈回来的位置信号进行脉冲控制, 保证步进电动机带动碟片按照给定的 速度和位置准确无误的转动到位。因此,步进电机的控制至关重要。 1.2、控制原理 风阀控制系统中, 步进电机整步步距角为 1.8 度机械角度, 每转 200步。一 个控制脉冲对应于步进电动机旋转一步。减速机减速比为 73:1,即步进电动机 转动 73步,经过减速机作用后阀门碟片转动 1步。转动的速度取决于脉冲频率。 利用模糊控制理论, 设计有速度控制器和位置控制器的双闭环控制方式。 电动风 阀控制系统如图 2所示。

多回转阀门电动装置使用说明书 1 1. 概述 多回转阀门电动装置,简称为 Z 型电装,是阀门实现开启、关闭或调节控制的驱动设备。 Z 型电装 适用于闸阀、截止阀、隔膜阀、柱塞阀、节流阀、水闸门等。可用于明杆阀,也可用于暗杆阀。 本系列电装具有功能全、性能可靠、控制系统先进、体积小、重量轻、使用维护方便等特点。可对 阀门实行远控、集控和自动控制。广泛用于电力、冶金、石油、化工、造纸、污水处理等行业。 本产品的性能符合 JB/T8528-1997《普通型阀门电动装置技术条件》的规定。隔爆型的性能符合 GB3836.1-2000《爆炸性气体环境用电气设备第 1 部分:通用要求》 ,GB3836.2-2000《爆炸性气体环境用 电气设备第 2 部分:隔爆型“ d”》及 JB/T8529-1997《隔爆型阀门电动装置技术条件》的规定。 多回转电动装置按防护类型分:有户外型和隔爆型; 按控制方式分:
热门知识
电动防风铁楔精华知识
电动防风铁楔-
话题: 工程造价yinjianmiao
-
话题: 地产家居kmhztsmyxgs
最新知识
电动防风铁楔-
话题: 工程造价lxa772494708
相关问答
电动防风铁楔-
话题: 工程造价rqrqzichen
电动防风铁楔相关专题
- 开一个电动窗帘店要多少钱
- 两吨12米电动葫芦价格
- 智能电动喷雾器价格
- 自动电动窗帘多少钱能买到
- 做电动三轮车棚多少钱
- 做电动平移门要多少钱
- 怎样才能记住电动工具价格
- 怎样计算电动机的短路电流
- 杰克工业电动缝纫机价格
- 金彭四轮电动车s7多少钱
- 中国电动汽车充电站市场现状与投资分析报告
- 在楼宇自控系统设计中如何选择最佳的电动调节阀口径
- 以电动葫芦为起升机构的简易强制式升降机钢丝绳检验
- 整体提升脚手架和环链电动葫芦在高层建筑施工中应用
- 永磁直流电动机—水泵系统由光伏电池供电的运行分析
- 增设Ⅱ型电动轮汽车主发电机磁场电流监测信号的构思
- 中国电动机制造产业分析及未来五年投资规划报告
- 增安型2/4极双速高压箱式空-水冷三相异步电动机
- 应用TRIZ理论对钢丝绳电动葫芦导绳器的改进设计
- 怎样正确连接三相电动机接线盒内已混乱的六根引出线
- 关于直线电动机在电动窗帘架上应用
- 感应电动机四开关低成本逆变器磁链轨迹改进控制
- 基于ADVISOR电动空调仿真模块开发及性能仿真
- 基于PLC和模糊控制电动机软启动控制器设计
- 广州蓄能水电厂B厂发电电动机继电保护系统国产化改造
- 含大规模电动汽车接入主动配电网多目标优化调度方法
- 基于ML4425干手器直流无刷电动机控制器设计