

基于LIDAR数据的建筑轮廓线提取及规则化算法研究
格式:pdf
大小:1.3MB
页数:7P
人气 :57
 4.7
4.7
建筑轮廓线提取与规则化是LIDAR数据处理和建筑三维建模的重要步骤和技术难点。首次将"AlphaShapes算法"应用于LIDAR数据处理,实践证明该算法简洁高效、运行稳定、提取精度高,适用于任何形状的建筑轮廓线提取,并具有一定自适应性和滤波功能,非常适合LIDAR点云数据提取建筑轮廓线。同时,提出了改进的"管子算法"用于原始轮廓线的简化,提出了适用于四边形的"矩形外接圆法"和适用于多边形(大于四边且边数为偶数)的"分类强制正交法"以进一步实现轮廓线的规则化,最终解决了离散点云提取规则建筑轮廓线的核心问题。实践证明,本文所述算法适用于凸凹多边形建筑内外轮廓线的提取与规则化。




基于Alpha Shapes算法的LIDAR数据建筑物轮廓线提取
机载lidar点云数据分布呈现离散化,扫描的目标点云没有明确的轮廓,而建筑物形状呈现复杂化和多样化,这给提取机载lidar数据中建筑物轮廓线带来了困难。alphashapes算法的优点在于无需知道点云中各点处的法向量及其他先验知识就能进行处理,避免了插值算法带来的误差影响,对于少量点云缺失及数据冗余的情况,算法仍具有良好的稳定性和适应性。alphashapes方法可以得到较为精细的建筑物边缘,且该算法适用于各种多边形建筑物轮廓线的提取。
基于LIDAR数据的建筑物轮廓提取
建筑物轮廓的准确提取是建筑物三维重建中最重要的一步。本文在研究已有建筑物轮廓提取方法的基础上,针对lidar离散的点云数据,提出了一种自动快速提取建筑物轮廓信息的方法。首先通过点云数据生成城市的数字表面模型(dsm)和数字地面模型(dtm)相减计算得出规则化的数字表面模型(ndsm),进而将地面点和非地面点进行分类;其次,考虑到地物的几何特性,提出一种8邻域搜索的方法对非地面点点云进行分割,得到建筑物表面点云;最后运用基于梯度图的边界跟踪的方法来获取建筑物的轮廓信息。实验表明:该方法能有效地提取建筑物轮廓。
编辑推荐下载

基于方向预测规则化的机载激光雷达建筑物正交轮廓线提取
格式:pdf
大小:5.7MB
页数:9P
4.5
提取建筑物轮廓线是机载激光雷达(lidar)点云数据特征提取的热点;为了获得较高精度的建筑物轮廓线;提出了一种基于方向预测规则化算法的机载激光雷达建筑物正交轮廓线提取方法;首先利用α-shape算法提取轮廓点;然后利用改进的douglas_peucker算法提取关键点并提出角度检验规则筛选关键点;使用随机抽样一致性算法简化轮廓线;最终用提出的方向预测算法进行轮廓线规则化;通过vaihingen城区数据对算法进行验证;结果表明:与流行的分类强制正交算法相比;方向预测规则化算法最大偏差平均减小了43.1%;均方根误差平均降低了39.7%;建筑物占地面积相对误差平均降低了7.02%;点云贡献率平均提高了9.32%;有效减小了机载激光雷达点云建筑物正交轮廓线规则化误差;
一种建筑物点云轮廓线的自动提取方法
格式:pdf
大小:624KB
页数:6P
4.7
针对地面激光点云包含大量冗余数据、特征信息不明显等缺点,提出了一种自动提取建筑物点云轮廓线的方法。首先基于主成分分析和熵函数计算每个点的最佳邻域,再根据几何位置关系,滤除散乱点和平面中的点,保留轮廓线点云。针对不同地面激光点云数据,无需反复调整阈值。实验证明,该方法提取的建筑物点云轮廓线清晰完整,与现有方法提取的结果相比正确率有一定的提高,且冗余点云几乎全部被滤除,自动化程度高,具有良好的适用性。
基于LIDAR数据建筑轮廓线提取及规则化算法热门文档
 基于Matlab凸轮轮廓线反求工程
基于Matlab凸轮轮廓线反求工程 基于Matlab凸轮轮廓线反求工程
格式:pdf
大小:180KB
页数:3P
4.6
根据图样所给出的凸轮运动规律基本尺寸,基于matlab提出了用傅里叶函数方法拟合凸轮的轮廓线,并对其拟合误差进行分析,与用多项式拟合方法的拟合误差进行比较,得出用同阶傅里叶函数拟合的方程误差平方和(sse)更趋向于0,且各拟合点误差较多项式拟合小,更能满足拟合精度。求出凸轮的轮廓线坐标,并输入到数控机床,完成凸轮的反求工程。实际运行结果表明,由该方法加工出来的凸轮满足生成工艺要求,可为类似凸轮设计提供借鉴。

基于彩色形态筛的建筑物主体轮廓提取算法
格式:pdf
大小:2.6MB
页数:6P
4.7
针对常见的城市建筑物图像,提出了一种由单幅图像自动完成建筑物主体轮廓提取的算法。算法利用基于凸包彩色形态筛的多尺度性,设计了城市建筑物场景贝叶斯概率统计模型,由最大化后验概率(maximumapos-terior,map)估计消隐点在图像中的投影,利用边缘像素分类的结果获得建筑物的主体轮廓。该算法可用于单幅图像,不需要边缘检测和hough变换等处理。实验结果证明,通过估计该场景结构可以自动获得消隐点在图像中的投影,进而提取建筑物的平行六面体主体轮廓。
基于彩色形态筛的建筑物主体轮廓提取算法
格式:pdf
大小:444KB
页数:6P
4.4
针对常见的城市建筑物图像,提出了一种由单幅图像自动完成建筑物主体轮廓提取的算法。算法利用基于凸包彩色形态筛的多尺度性,设计了城市建筑物场景贝叶斯概率统计模型,由最大化后验概率(maximumapos-terior,map)估计消隐点在图像中的投影,利用边缘像素分类的结果获得建筑物的主体轮廓。该算法可用于单幅图像,不需要边缘检测和hough变换等处理。实验结果证明,通过估计该场景结构可以自动获得消隐点在图像中的投影,进而提取建筑物的平行六面体主体轮廓。
基于灰关联模型的凸轮廓线检测系统
格式:pdf
大小:310KB
页数:4P
4.6
文章建立了凸轮廓线的极径值序列灰关联模型,通过分析凸轮廓线的轮廓度来评价被测凸轮的合格性。设计了非接触式凸轮廓线检测系统,能够检测凸轮的极径值,并根据灰关联模型的评定结果自动分拣合格凸轮。对汽车制动系上的某型凸轮进行测试实验,实验结果表明,基于灰关联模型的凸轮廓线检测系统的合格性评估误差在[0.02,0.05]之间,合格性评估的标准差为0.084,文中设计的检测系统的精度是传统方法的5倍以上。基于灰关联模型的凸轮廓线检测系统更适合于凸轮的批量检测和精细生产。
大断面硐室施工轮廓线的绘制方法
格式:pdf
大小:298KB
页数:2P
4.5
山西焦煤集团白家庄煤矿八盘区暗斜井大断面绞车硐室,在施工中用数学方法解决了画轮廓线的难题,减少了高处作业搭、拆施工平台工序,保证了施工正规循环作业,施工方便、准确性高,取得了良好的经济技术效果。
基于LIDAR数据建筑轮廓线提取及规则化算法精华文档
基于直线检测算法的卫星图片中建筑物轮廓提取
格式:pdf
大小:702KB
页数:3P
4.7
提出一种方法,可以从卫星图像中自动检测建筑物。介绍了直线提取和直线合并的算法,分别讨论算法的实现结果和对结果的评价。建筑物检测的结果为矢量的二维候选数据,缩短了原始图像数据和最后对图像理解之间的差距。
GPU加速的光滑轮廓线绘制 GPU加速的光滑轮廓线绘制
格式:pdf
大小:1.7MB
页数:3P
4.5
轮廓线的高效提取是非真实感绘制的一个关键问题。提出了一个完全利用gpu生成光滑轮廓线的高效算法。在几何处理阶段,先根据相邻三角形的法向量与视向量的关系检测出轮廓线,然后对轮廓线进行宽度扩充,同时对轮廓线顶点设置相应的渐变因子;在像素处理阶段把渐变因子转化为相应的alpha值,通过光照生成卡通渲染,最后通过alpha混合得到光滑轮廓线。算法完全在gpu里实现,能满足实时的绘制要求。
用五次PH曲线设计圆盘凸轮轮廓线的研究 用五次PH曲线设计圆盘凸轮轮廓线的研究
格式:pdf
大小:285KB
页数:4P
4.6
针对凸轮轮廓线目前在设计和应用中存在的不足,提出用五次bézier形式的ph曲线设计对心直动滚子圆盘凸轮理论廓线,使凸轮从动件的运动速度和加速度光滑连续,且在推程、回程的起点、终点处的速度和加速度皆为零,从而极大地改善了从动件的运动特性和动力特性,并且由所得的理论廓线可精确、方便地获得凸轮的实际廓线和数控加工系统中刀具运动轨迹曲线.
平底从动件盘形凸轮廓线的极坐标解析法设计 平底从动件盘形凸轮廓线的极坐标解析法设计
格式:pdf
大小:212KB
页数:6P
4.7
针对盘形凸轮廓线设计工作量大和设计精度较低的问题,以从动件的等速运动、等加速等减速运动、简谐运动、摆线运动的位移表达式出发,提出用极坐标矢量解析法设计平底从动件盘形凸轮廓线,并且利用该方法推导出了盘形凸轮廓线方程.
隧道轮廓线开挖及喷射混凝土控制技术 隧道轮廓线开挖及喷射混凝土控制技术
格式:pdf
大小:3.9MB
页数:6P
4.4
以新建怀邵衡铁路hshzq-4标段内拱桥铺隧道施工为背景,结合工程实践,对岩溶地质条件下的隧道轮廓线开挖和喷射混凝土施工技术进行总结,有效控制了岩溶隧道超挖量和喷射混凝土超耗量,积累了一定的技术和实践经验,可为同类工程施工提供借鉴。
基于LIDAR数据建筑轮廓线提取及规则化算法最新文档

基于体元的机载LiDAR点云数据建筑物提取算法
格式:pdf
大小:533KB
页数:4P
4.4
针对目前机载lidar点云数据存在的数据组织效率低下以及不利于查询等问题,本文提出了一种基于体元的建筑物提取算法。首先,构建体元模型实现机载lidar数据的真三维描述;然后,计算局部邻域曲面拟合残差,将残差最小的体元视作种子体元;最后,根据局部邻域法向量夹角准则来实现种子体元的区域增长,从而获得建筑物点。本文选取isprs公开的点云滤波测试数据中的8种复杂场景进行实验,实验结果表明:本文算法不仅原理简单、容易实现,而且具有较好的鲁棒性,不会受地形以及建筑物类型和尺寸的限制,kappa系数达到80%以上,实现了复杂场景下建筑物的提取。
基于图像处理技术的石材大板表面轮廓提取算法 基于图像处理技术的石材大板表面轮廓提取算法
格式:pdf
大小:617KB
页数:5P
4.8
目的研究石材大板表面轮廓提取算法,实现石材大板的在线测量,解决国内石材企业不能对板材进行在线测量和数控加工问题.方法采用ccd摄像机、图像采集卡和计算机来实现非接触测量系统的硬件搭建,构成基于ccd技术的石材大板在线测量系统,利用数字图像处理技术进行石材大板表面廓形特征提取.用vc++编程实现图像灰度变换、平滑处理、图像分割和数学形态学处理过程,完成了石材大板表面轮廓提取.结果通过ccd图像采集系统可以完成石材表面廓形提取,提取的廓形达到了石材设计要求.结论利用灰度变换、平滑处理、图像分割和数学形态学等图像处理技术完成的石材表面轮廓提取,为进一步高精度尺寸计算提供基础.对利用矿山资源,节能减排具有重要意义.
掘进工作面划轮廓线的通知MicrosoftWord文档
格式:pdf
大小:114KB
页数:3P
4.7
关于掘进工作面划轮廓线的通知 为了保证掘进巷道的光面爆破和支护成形质量,要求掘进工作 面在打眼前(或割煤前)及爆破后按作业规程要求的断面尺寸划轮廓 线(半圆拱),具体要求如下。 1、划轮廓线的方法:先延伸巷道中线至工作面迎头,按中左、 中右尺寸要求,确定巷道两帮位置并标记;延伸巷道腰线至工作面, 根据墙高确定巷道拱基线,巷道两帮拱基线与中线的交点即为半圆拱 圆心。如中线为偏中线,必须按尺寸移至巷道中心线线上。用皮尺画 巷道顶部轮廓线,皮尺的一端压在半圆拱圆心上,另一头按巷道宽度 二分之一轮尺画线,并标记清楚,再按爆破说明书要求标定眼位打眼。 2、705回风顺槽腰线即为巷道拱基线,距底1.6米,距顶1.9米, 中线即为中中线。掘33米平巷后巷高变为设计高度3.2米,腰线(拱 基线)距底1.3米,距顶1.9米。 3、705材料上山腰线距底1米,距顶2.6米,腰线升
基于LiDAR数据的建筑物自动提取方法的比较
格式:pdf
大小:751KB
页数:4P
4.7
简述三种典型的利用lidar点云自动提取建筑物的方法。提出对建筑物提取结果的精度评价指标,并对三种方法的提取结果进行比较。结果表明基于dempster-shafer理论的建筑物自动提取方法最为稳健。
触针式轮廓测量误差修正算法 触针式轮廓测量误差修正算法
格式:pdf
大小:189KB
页数:未知
4.4
本文在介绍触针式二维轮廓测量仪基本工作原理的基础上,分析触针测量方式的固有误差和缺陷;设计了有效的误差修正算法,弥补触针式轮廓测量的固有误差;引进了形态学滤波算法,有效地滤除噪声、振动等干扰信号并保留了有用信息,同时补偿了由触针半径引入的测量误差,提高了仪器测量精度.
基于UGNX的圆柱凸轮轮廓曲线的参数化设计 基于UGNX的圆柱凸轮轮廓曲线的参数化设计
格式:pdf
大小:143KB
页数:2P
4.6
针对采用传统的设计方法设计凸轮轮廓曲线存在曲线形状不准确、设计计算繁琐、产品设计周期长等缺点,介绍了集cad/cae/cam于一体的三维参数化软件ugnx在设计复杂圆柱凸轮轮廓曲线中的运用。
基于UGNX的圆柱凸轮轮廓曲线的参数化设计 基于UGNX的圆柱凸轮轮廓曲线的参数化设计
格式:pdf
大小:2.3MB
页数:1P
4.8
凸轮机构是一种广泛应用于各种机械和控制装置中的高副机构,只要能正确设计出凸轮的轮廓曲线,就可以通过凸轮机构实现各种复杂的预定的运动规律。针对传统凸轮轮廓曲线设计方法的缺陷和不足,本文介绍了集cad/cae/cam于一体的三维参数化软件ugnx在设计复杂圆柱凸轮轮廓曲线中的应用,为优化凸轮轮廓曲线设计方法提供了一定的参考依据。
某圆柱凸轮机构中凸轮凹槽轮廓线的反求设计 某圆柱凸轮机构中凸轮凹槽轮廓线的反求设计
格式:pdf
大小:304KB
页数:3P
4.8
以某矿所使用的圆柱凸轮机构中的凸轮凹槽轮廓线的设计为例,简单介绍了反求设计的分析理论和设计方法,并用运动分析软件证明了反求设计的分析理论和设计方法的可行性。
某圆柱凸轮机构巾凸轮凹槽轮廓线的反求设计 某圆柱凸轮机构巾凸轮凹槽轮廓线的反求设计
格式:pdf
大小:215KB
页数:未知
4.7
以某矿所使用的圆柱凸轮机构中的凸轮凹槽轮廓线的设计为例.简单介绍了反求设计的分析理论和设计方法,并用运动分析软件证明了反求设计的分析理论和设计方法的可行性。
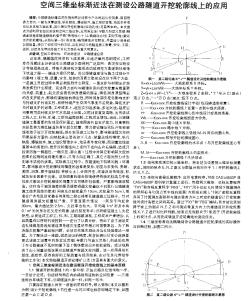
空间三维坐标渐近法在测设公路隧道开挖轮廓线上的应用
格式:pdf
大小:1.2MB
页数:2P
3
空间三维坐标渐近法在测设公路隧道开挖轮廓线上的应用——公路隧道钻爆法开挖洞身围岩过程中产法的超欠挖现象,原因是多方面的。一般有测量放线、钻孔精度、爆破技术、施工组织管理、地质条件变化以及其他方面因素,其中测设开挖轮廓线(周边孔线)是最基本的。本...
基于LIDAR数据建筑轮廓线提取及规则化算法相关
文辑推荐
知识推荐
百科推荐


职位:安全评价师(二级)
擅长专业:土建 安装 装饰 市政 园林


