

基于车载CAN总线的倒车雷达单元设计
格式:pdf
大小:490KB
页数:3P
人气 :50
 4.3
4.3
倒车雷达在汽车中得到广泛应用,但没有与车载CAN总线网络相联系,造成其功能不完善。用PIC18F258单片机设计一个倒车雷达单元,使倒车雷达能够被车载网络识别,实现与CAN总线的数据通信与资源共享,完成倒车雷达的自动刹车功能。




倒车雷达安装
倒车雷达安装 史上最详尽的奔奔mini倒车雷达安装过程,自己动手,丰衣足食。 倒车吃了好几次亏,这次不得以才买了一个便宜的倒车雷达,不是可视, 下一步准备装个多合一一体机,所以这次买个便宜的。 可视的倒车雷达也可以参照本安装过程来自己安装,实在,装起来一个 小时就可以了,我是自己摸索的,所以花了2个多小时。 钻探头孔的电钻我没有,我就把车开到一个修单车的修车铺,给了几块 钱找修单车的师傅帮忙钻的。多省事阿。 56楼有更新,解决色差.不过在此提醒一下,最好买和原车色彩差不 多的,这样喷的厚度就会薄一些,要不然完全不是一种颜色的,特别是深 色到浅色.比如橙色喷成黄色,就要喷的多一些厚一些,难免会影响探 测灵敏度. 工具:十字螺丝刀一把,2mm宽一字螺丝刀一把,电钻一把(没有可以 开车去找修单车铺),小刀剪刀各一把,绝缘胶布等等 这个位置我觉最佳:倒
(整理)四线制倒车雷达探头电气原理图.
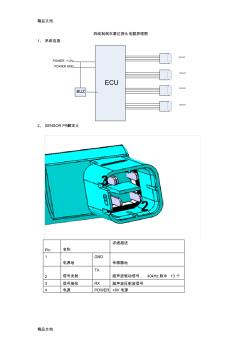
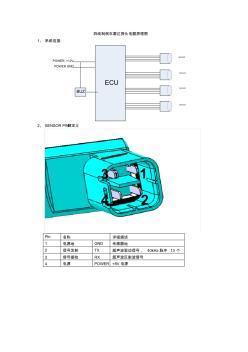
精品文档 精品文档 四线制倒车雷达探头电器原理图 1、系统连接 ecu power+12v powergnd sensor sensor sensor sensor buz 2、sensorpin脚定义 pin名称 详细描述 1 电源地 gnd 传感器地 2信号发射 tx 超声波驱动信号,40khz脉冲13个 3信号接收rx超声波反射波信号 4电源power+8v电源 2 3 精品文档 精品文档 3、信号时序 40khz13个 余振 障碍物反射信号 tx rx 8v 8v 控制器tx信号脚发射+8v40khz的方波脉冲13个用于驱动sensor产生超声波。超声 波经过障碍物反射后反射波被sensor接收。semsor接收反射信号后经过放大滤波及 整形变成如上图rx信号的图像。其中余振大约1.2ms,由于障碍物不同和距离的
编辑推荐下载
四线制倒车雷达探头电气原理图
格式:pdf
大小:92KB
页数:2P
4.5
四线制倒车雷达探头电器原理图 1、系统连接 ecu power+12v powergnd sensor sensor sensor sensor buz 2、sensorpin脚定义 pin名称详细描述 1电源地gnd传感器地 2信号发射tx超声波驱动信号,40khz脉冲13个 3信号接收rx超声波反射波信号 4电源power+8v电源 1 2 3 4 3、信号时序 40khz13个 余振 障碍物反射信号 tx rx 8v 8v 控制器tx信号脚发射+8v40khz的方波脉冲13个用于驱动sensor产生超声波。超声 波经过障碍物反射后反射波被sensor接收。semsor接收反射信号后经过放大滤波及 整形变成如上图rx信号的图像。其中余振大约1.2ms,由于障碍物不同和距离的原因 是障碍物反射信号强弱不同。
车载CAN总线倒车雷达单元设计热门文档
 基于CAN总线的汽车仪表盘电控单元设计
基于CAN总线的汽车仪表盘电控单元设计 基于CAN总线的汽车仪表盘电控单元设计
格式:pdf
大小:281KB
页数:4P
4.4
将汽车电控单元与机械仪表盘结合,针对成本可控制和机械指针仪表读数不准等问题,在研究汽车电子仪表技术的基础上,设计并实现了一种应用于电子机械式汽车仪表盘显示的电控单元。经过测试工装测试及显示数据对比等实验,该电控单元能够精确驱动汽车仪表盘进行显示,具有实用价值。
基于CAN总线的新能源车载空调标定软件的设计 基于CAN总线的新能源车载空调标定软件的设计
格式:pdf
大小:1015KB
页数:4P
4.8
针对传统车载空调标定软件的操作复杂、通用性差、适用人群有限等缺点,采用can总线的网络互连方式来组织车载空调标定系统,使用标定软件对空调、变频器内的各参数进行在线标定、实时监测.使用c#设计的标定软件平台,界面简洁,操作方便,通用性强.该软件不仅为汽车空调控制系统提供了准确、实时的通信保证,而且也为系统检测提供了有利的保障.
基于CAN总线的新能源车载空调标定软件的设计 基于CAN总线的新能源车载空调标定软件的设计
格式:pdf
大小:1.0MB
页数:4P
4.6
针对传统车载空调标定软件的操作复杂、通用性差、适用人群有限等缺点,采用can总线的网络互连方式来组织车载空调标定系统,使用标定软件对空调、变频器内的各参数进行在线标定、实时监测.使用c#设计的标定软件平台,界面简洁,操作方便,通用性强.该软件不仅为汽车空调控制系统提供了准确、实时的通信保证,而且也为系统检测提供了有利的保障.
基于CAN总线的电喷系统控制单元设计 基于CAN总线的电喷系统控制单元设计
格式:pdf
大小:588KB
页数:3P
4.6
文章介绍了摩托车发动机电喷系统控制单元(ecu)的工作原理,提出了一种基于can总线的电喷系统控制单元(ecu)的设计方案。介绍了该控制单元的硬件结构、软件的设计方法、系统微处理器外围串行接口(spi)与can控制器通讯的过程,分析了该电喷系统控制单元设计的优点。
基于CAN总线的机器人单元监控系统的设计 基于CAN总线的机器人单元监控系统的设计
格式:pdf
大小:790KB
页数:5P
4.7
针对机器人制造单元现场环境复杂、监控所需数据量大,实时性、可靠性要求高的特点,设计并开发了一种基于can总线的机器人制造单元监控系统。该系统主要包含数据采集与通讯、可视化监控和信息存储三部分。重点介绍了基于80c51的can总线节点在机器人制造单元中的软、硬件的实现架构及其应用。实际运行表明,该系统能有效的监控机器人制造单元的运行,保证单元运行的稳定、可靠,提高机器人制造单元运行效率。
车载CAN总线倒车雷达单元设计精华文档
 某车载雷达方位举升控制箱的改装设计
某车载雷达方位举升控制箱的改装设计 某车载雷达方位举升控制箱的改装设计
格式:pdf
大小:104KB
页数:2P
4.6
主要介绍了某车载雷达方位举升控制箱机箱的改装设计,着重阐述了该户外机箱的结构组成,机箱内器件布局及走线方式,并对其防雨、防尘、防盐雾,电磁屏蔽、抗振性及热设计等结构设计进行了充分考虑。
基于CAN总线的雷达液位仪通信模块设计 基于CAN总线的雷达液位仪通信模块设计
格式:pdf
大小:555KB
页数:4P
4.4
雷达液位仪是一种非接触式的高精度液位测量仪表。针对现有雷达液位仪不具有现场总线通信方式的现状,设计了基于can总线的雷达液位仪通信模块,给出了硬、软件的设计方案,并指出了需要注意的问题,为组建基于can总线的液位测量系统打下了良好的基础。实验表明,该通信模块具有结构简单、工作稳定可靠、通信速率高等特点。
煤层气发动机电控单元的CAN总线设计 煤层气发动机电控单元的CAN总线设计
格式:pdf
大小:1.5MB
页数:4P
4.8
为便于发动机电控系统更好地融入到整车通讯控制体系中,文章采用pic18f448型单片机和pca82c250型芯片,以原有煤层气发动机电控系统为模板,对集成式的can总线通讯模块进行了研究,完成了硬件电路和程序的设计;数据收发包括标准帧和扩展帧,均采用中断控制方式实现。指出该can模块可作为一个独立的can节点使用,为煤层气发动机ecu融入整车控制ecu的通讯体系奠定了基础。
基于车载4线激光雷达的前方道路可行驶区域检测
格式:pdf
大小:1.1MB
页数:8P
4.7
通过分析大量激光雷达数据,提出了改进的dbscan算法对雷达数据进行聚类,以使智能汽车获得前方道路和障碍物信息。根据不同的密度参数,多次调用该算法完成多密度聚类。结合提出的道路边沿、路面和障碍物等信息提取方法,在结构化或半结构化的城市道路中对提出的方法进行实车试验,结果表明该算法可实时准确的提取智能汽车的可行驶区域信息。
车载CAN总线倒车雷达单元设计最新文档
基于车载激光雷达的铁路既有线复测技术研究 基于车载激光雷达的铁路既有线复测技术研究
格式:pdf
大小:318KB
页数:5P
4.8
研究目的:随着铁路运营里程的增加和行车速度的提升,既有线复测的工作量也日益增多.传统的既有线复测方法存在较大的安全隐患,且工序多,作业效率较低,故急需探索一种高效、安全、实用的作业手段.研究结论:(1)车载激光雷达测量技术可以快速、实时地获取铁路周围地形的空间几何信息,对铁路运营管理几乎零干扰;(2)通过少量地面控制点对原始激光点云数据进行精化处理,可获得满足铁路复测精度要求的海量数据;(3)获取的数码影像成果真实记录了铁路周围的现场状况以及公务设备情况,使得各项调查成果更加直观可靠;(4)本研究成果可应用于既有铁路复测、增设复线、设备维护、景观可视化等方面,可为铁路运营系统信息化管理创造条件.
基于车载4线激光雷达的前方道路可行驶区域检测
格式:pdf
大小:1.1MB
页数:8P
4.3
通过分析大量激光雷达数据,提出了改进的dbscan算法对雷达数据进行聚类,以使智能汽车获得前方道路和障碍物信息。根据不同的密度参数,多次调用该算法完成多密度聚类。结合提出的道路边沿、路面和障碍物等信息提取方法,在结构化或半结构化的城市道路中对提出的方法进行实车试验,结果表明该算法可实时准确的提取智能汽车的可行驶区域信息。
CAN总线混合动力骄车电控系统的设计与实现.
格式:pdf
大小:19KB
页数:3P
4.7
can总线混合动力骄车电控系统的设计 与实现 混合动力汽车是一种由内燃机和电动机混合驱动的汽车,其主要特点是节能、 环保。这种汽车在起步时用电动机驱动,消除了内燃机起步时由于燃烧不充分 而排黑烟的现象。在汽车减速或刹车时,利用发电机把动能转化成电能,贮存 到蓄电池中,实现能量回收达到节能的目的。由于这种汽车是内燃机和电动机 两种动力并存,仅用传统的针对内燃机的电控系统无法实现两种动力的最佳配 合,因此开发混合动力车的全新电控系统是十分必要的.本文以一种 混合动力汽车是一种由内燃机和电动机混合驱动的汽车,其主要特点是节能、 环保。这种汽车在起步时用电动机驱动,消除了内燃机起步时由于燃烧不充分 而排黑烟的现象。在汽车减速或刹车时,利用发电机把动能转化成电能,贮存 到蓄电池中,实现能量回收达到节能的目的。由于这种汽车是内燃机和电动机 两种动力并存,仅用传统的针对内燃机的电控系统无法实现两种动力
基于CAN总线的客车空调控制器设计 基于CAN总线的客车空调控制器设计
格式:pdf
大小:67KB
页数:4P
4.5
介绍了一种基于can总线的客车空调控制器的设计方案。该方案实现了数据采集,外围负载驱动控制,can总线传输,人机交互等一系列功能。满足客车空调对功能完整性,调节舒适性的要求,具有成本低、效果好、兼容性好的特点。
 基于单片机的汽车倒车雷达设计
基于单片机的汽车倒车雷达设计 基于单片机的汽车倒车雷达设计
格式:pdf
大小:92KB
页数:1P
4.5
随着社会的发展进步,汽车开始普及,全民汽车时代即将到来,汽车倒车雷达是汽车上重要的装置。本系统的原理是超声波测距仪的发射探头发出超声波,当超声波遇到障碍物后反射回来,由超声波接收器接收,再由单片机计算出超声波发出与返回的时间,就可以计算出汽车与障碍物的距离,当距离小于报警距离时,单片机控制蜂鸣器与数码管显示发出报警信号。
基于单片机的汽车倒车雷达系统设计 基于单片机的汽车倒车雷达系统设计
格式:pdf
大小:105KB
页数:1P
4.5
随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断地增加。交通拥挤状况日益严重,撞车事件也经常发生,造成了很多的人身伤亡和经济损失。面对这种情况,设计一种响应快、可靠性高并且比较经济实用的汽车倒车雷达系统就显得非常重要。本文是基于超声波测距的汽车倒车雷达系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和stc89c52单片机结合于一体,设计出一种基于stc89c52单片机的倒车雷达系统。本系统采用软硬件结合的方法,具有模块化和多用化的特点。
基于CAN总线的汽车电子控制系统单元设计 基于CAN总线的汽车电子控制系统单元设计
格式:pdf
大小:65KB
页数:1P
4.5
当今时代,经济技术不断发展,在各项技术高度发达的今天,人们的各项生活都离不开高新技术,可以说高新技术为人类的衣食住行都提供了更加便捷和高水准的帮助。本研究主要立足于汽车行业,基于can总线技术对汽车的电子控制系统进行研究,并简要就基于can总线的电子控制系统单元设计提出一些见解,希望所得结果能够引起大家的关注和重视,并能够为相关领域提供可行的参考。
基于CAN总线的车载电源设备监控网络系统设计 基于CAN总线的车载电源设备监控网络系统设计
格式:pdf
大小:148KB
页数:2P
4.6
为了提高车载电子信息系统中电源设备智能化与网络化程度,本文提出了一种基于can总线的车载电源设备监控网络系统设计。本文对于该监控网络系统的总体结构进行简明的阐述,详细介绍了监控网络系统中上位机、下位机监控节点相关的硬件与软件设计。
基于51单片机超声波测距仪倒车雷达报警装置设计 基于51单片机超声波测距仪倒车雷达报警装置设计
格式:pdf
大小:155KB
页数:3P
4.6
一款倒车雷达报警装置可以随时提醒司机前后障碍区的距离状况,保证司机的安全,倒车仪雷达报警主要采用51单片机、超声波测距模块构成;51单片机作为主芯片,利用超声波测算出距离,当超声波遇见汽车前后的障碍物,再利用单片机处理运行,并且通过设置距离来比较大小,当低于设定值单片机stc89c51将发出命令控制蜂鸣器报警。
车载CAN总线倒车雷达单元设计相关
文辑推荐
知识推荐
百科推荐


职位:市政工程材料员
擅长专业:土建 安装 装饰 市政 园林


