

基于MSP430F169的电缆管道牵引机器人系统设计
格式:pdf
大小:236KB
页数:3P
人气 :92
 4.6
4.6
为解决日益繁重的城市地下电缆管道敷设问题,介绍一种电缆管道牵引机器人系统。可实现电缆管道敷设的机械化操作,并完成机器人的实时定位。给出以MSP430F169为核心的硬件电路以及关键源程序设计。实践证明,此系统具有一定的实用性。



 基于MSP430F169的环境光自适应LED显示屏设计
基于MSP430F169的环境光自适应LED显示屏设计 基于MSP430F169的环境光自适应LED显示屏设计
本设计主要实现led显示屏随着环境光改变其亮度,以避免白天显示不清或黑夜因太亮而炫目;并与上位机进行通信.本系统由msp430f169单片机、16*32共阳极led点阵显示屏、行驱动电路、列驱动电路、环境光自适应电路、数字开关调压电路、直流稳压源电路等组成.采用按列并行发送数据,按行扫描的方式实现led点阵屏内容的显示;单片机通过数字开关调压电路实现对led点阵屏电源电压的自动调节,使屏幕亮度随环境光自动变化.
编辑推荐下载
山东东营供电公司与上海交大联合开发电缆管道牵引机器人通过鉴定 山东东营供电公司与上海交大联合开发电缆管道牵引机器人通过鉴定
格式:pdf
大小:61KB
页数:未知
4.7
2008年3月18日,由山东东营供电公司与上海交通大学合作开发的科技成果“基于视频监控的电缆管道牵引机器人”,在济南顺利通过山东省科技成果鉴定委员会专家鉴定。该机器人将电缆敷设过程中的管道监测和敷设拉线功能集于一身,通过前端的摄像监测器,实时监视管道前方及管壁的情况,能在机器人穿越管道完成敷设电缆拉线的同时,对管道中的状况进行图像监视;能够有效地检验电缆管道土建质量及电缆施工中的敷设质量,
山东东营供电公司与上海交大联合开发电缆管道牵引机器人通过鉴定 山东东营供电公司与上海交大联合开发电缆管道牵引机器人通过鉴定
格式:pdf
大小:1.9MB
页数:1P
4.4
2008年3月18日,由山东东营供电公司与上海交通大学合作开发的科技成果"基于视频监控的电缆管道牵引机器人",在济南顺利通过山东省科技成果鉴定委员会专家
MSP430F169的电缆管道牵引机器人系统设计热门文档

电缆管道机器人视频监测系统的开发
格式:pdf
大小:4.5MB
页数:97P
4.7
上海交通大学 硕士学位论文 电缆管道机器人视频监测系统的开发 姓名:戚伟 申请学位级别:硕士 专业:电力电子与电力传动 指导教师:黄成军;江秀臣 20080101 上海交通大学硕士学位论文 -i- 电缆管道机器人视频监测系统的开发 摘要 随着城市电网的大规模建设,电力电缆采用自动化敷设方法,可以 避免人工敷设带来的效率低下、操作不便等诸多问题,改善电缆敷设质 量,延长电缆使用寿命,保证客户可靠用电。 本文介绍了一种新型可靠的电缆管道机器人系统,通过前端的摄像 监测装置实时监视管道前方及管壁的图像,不仅能在机器人穿越管道的 同时,完成敷设电缆的要求;而且能够对管道中的土建残渣进行清扫, 有效地促进电缆排管土建质量及电缆施工中的敷设质量,为电缆敷设提 供了有效的辅助手段。通过该仪器的使用,能够降低电缆损伤事故、延 长电缆使用寿命,具有广泛的社会及经济效益。 本文涉及的电缆管道机器人系
管道机器人移动牵引机构设计 管道机器人移动牵引机构设计
格式:pdf
大小:218KB
页数:3P
4.8
管道机器人是特种机器人研究领域中的热点.该文设计了管道机器人蠕动式移动牵引机构,采用电机驱动丝杠正反转,丝杠上丝杠螺母前移,前后两组支撑腿臂交替支撑住管壁,从而实现了机器人的蠕动式前行的驱动方案,并设计了该系统的电控部分.模拟管道中的实验验证了该方案的可行性.
可变径管道机器人系统的设计与研究
格式:pdf
大小:422KB
页数:4P
4.4
第41卷2013年第4期 本 栏 目 编 辑 陆 秋 云 通 用 124 可变径管道机器人系统的 设计与研究 武 燕1,王才东2,王新杰2,牛志军2 1 河南机电职业学院机械工程系 河南郑州 451191 2 郑州轻工业学院机电工程学院 河南郑州 450002 摘要:笔者在分析管道机器人国内外发展现状基础上,针对管道机器人对不同管径需求,提出了一种 双履带式可变径管道机器人的总体方案。设计了机器人的驱动装置、直径调节机构等关键部件,并设 计了机器人的控制系统,该控制系统上采用了上、下位机控制结构,通过手动和自动2种控制模式, 实现机器人无级调速、前进、后退、转弯和图像信息采集等功能。研究结果为可变径管道机器人的实 用化开发奠定了基础。 关键词:管道机器人;变管径;穿缆;控制系统 中图分类号:tp242 文献标志码:a 文章编号:1001-3954
嵌入式清洁机器人系统设计 嵌入式清洁机器人系统设计
格式:pdf
大小:79KB
页数:2P
4.7
室内地面清洁是一项枯燥乏味的重复性劳动,传统吸尘器工作时需要人的参与,且操作不便。室内地面清洁机器人将移动机器人技术和吸尘器技术有机地融合起来,结构灵巧,实现了室内环境的自主清洁,是一种环保、健康、智能型的服务机器人,具有广阔的应用前景和市场需求。本设计实现一种全自主清洁机器人,并对路径规划、避障算法、自动充电算法进行研究。
康威电缆隧道智能巡检机器人系统介绍
格式:pdf
大小:1.4MB
页数:3P
4.7
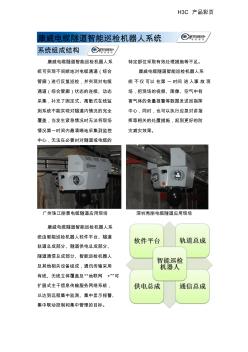
h3c产品彩页 康威电缆隧道智能巡检机器人系 统可实现不间断地对电缆通道(综合 管廊)进行反复巡检,并实现对电缆 通道(综合管廊)状态的连续、动态 采集,补充了固定式、离散式在线监 测系统不能实现对隧道内情况的完全 覆盖,当发生紧急情况时无法将现场 情况第一时间内最清晰地采集到监控 中心,无法在必要时对隧道或电缆的 特定部位采取有效处理措施等不足。 康威电缆隧道智能巡检机器人系 统不仅可以在第一时间进入事故现 场,把现场的视频、图像、空气中有 害气体的含量报警等数据发送回指挥 中心,同时,也可以执行应急对讲指 挥等相关的处置措施,起到更好的防 灾减灾效果。 广州珠江丽景电缆隧道应用现场深圳秀丽电缆隧道应用现场 康威电缆隧道智能巡检机器人系 统由智能巡检机器人软件平台、隧道 轨道总成部分、隧道供电总成部分、 隧道通信总成部分、智能巡检机器人 及其他相关设备组成,通讯传输采用 有线
MSP430F169的电缆管道牵引机器人系统设计精华文档
基于MSP430点光源跟踪系统设计 基于MSP430点光源跟踪系统设计
格式:pdf
大小:726KB
页数:3P
4.6
提出了一种基于msp430的点光源跟踪的具体设计方案,并对设计方案的硬件组成、程序设计、调试进行了介绍,实验证明,所设计的光源自跟踪系统有较强的适应能力,反应迅速,灵活性大。
基于MSP430的微型足球机器人无线通信子系统的设计 基于MSP430的微型足球机器人无线通信子系统的设计
格式:pdf
大小:514KB
页数:未知
4.7
无线通信子系统是微型足球机器人比赛系统中的至关重要部分,它起到桥梁的作用。论文采用msp430f149单片机作为无线发送和接收控制芯片,首先上位机将控制命令通过计算机串口传输到单片机中,然后单片机控制无线发射装置将指令以广播的方式发送给装有无线接收芯片的足球机器人,最后机器人上的控制芯片按照接收到的指令决定足球机器人左右轮的转速,从而实现对足球机器人的控制。
基于分布式结构的图书整理机器人系统设计 基于分布式结构的图书整理机器人系统设计
格式:pdf
大小:10.0MB
页数:4P
4.5
针对图书馆图书借阅、上下架和传送整理的智能化需求,设计、开发了一种基于分布式结构的图书整理机器人系统.该系统由循迹移动底盘、图书夹取机械臂和人机交互界面3部分组成.图书整理机器人系统采用plc和单片机作为主控单元,利用超声波传感器和灰度循迹传感器作为障碍检测及巡线定位模块,采用三轴直角坐标运动平台和mg995舵机作为机械臂的三维运动机械臂的驱动装置.通过visu+开发的人机交互界面选取图书信息,可以在无人干预的情况下,实现机器人的巡线定位、超声波避障、自动取/还书籍和实时通信.经过原理样机的搭建和实际测试,验证了系统的可行性和正确性.该系统设计简单、节能环保、自动化执行效率高,能够降低图书馆员的劳动强度,适用于各类大、中、小型图书馆和阅览室,具有广阔的应用空间.
基于MSP430F149控制的LED图文显示的设计 基于MSP430F149控制的LED图文显示的设计
格式:pdf
大小:180KB
页数:未知
4.3
本设计电路具有基本图形的显示、文字显示功能、led灯亮暗自动调节等功能。通过按住按钮依次调用程序配合电机转动实现开机自检、同心圆、双渐开线等功能显示。
电缆管道
格式:pdf
大小:63KB
页数:2P
4.7
89525400.xls砼包封 高宽数量高宽数量高宽数量高宽数量模板高宽数量模板 1p7530.20.821.0626.250.150.462.080.070.460.974.230.20.261.5712.08 2p7555.30.821.1853.510.150.584.810.070.582.257.740.20.384.2022.12 3p7552.80.9451.3868.860.150.584.590.070.582.147.390.3250.386.5234.32 4p7560.50.9451.3878.900.150.585.260.070.582.468.470.3250.387.4739.33 6p7526.10.9
MSP430F169的电缆管道牵引机器人系统设计最新文档
基于MSP430的线阵LED图文显示系统设计 基于MSP430的线阵LED图文显示系统设计
格式:pdf
大小:163KB
页数:未知
4.6
根据视觉暂留原理,设计了一种线阵led图文显示系统。选用ti公司的msp430g2553单片机为主控制器,用直流电机带动线阵led电路板高速旋转,经过不同位置时,点亮相应的led,在旋转平面上显示静态或动态图文信息,通过光敏元件感应外界光照强度控制led灯亮暗程度。该系统具有成本低、驱动简单、视角广、耗能低等优点。
基于MSP430单片机F149的GSM电子门匙设计 基于MSP430单片机F149的GSM电子门匙设计
格式:pdf
大小:245KB
页数:2P
4.4
msp430系列单片机是一种超低耗性能的单片机品种。本文介绍了一种基于msp430f149的gsm电子门匙的设计,并且通过调试,给出此方案的可行性结论。
电缆沟道智能巡检机器人研究 电缆沟道智能巡检机器人研究
格式:pdf
大小:169KB
页数:未知
4.7
电缆沟道智能巡检机器人研究,是一种基于集成检测和自动控制技术的巡检装置,该装置配置的温湿度传感器、热成像仪、摄像机、微波探伤仪和电源模块等能实现对电缆沟道的温湿度、热分布、空间成像、设备物理缺陷等情况的实时监控,能代替人工高效率高质量的巡检,及时发现电缆沟内的各种安全隐患,防患于未然。
基于MSP430F425单片机的超低功耗智能电表的设计 基于MSP430F425单片机的超低功耗智能电表的设计
格式:pdf
大小:158KB
页数:未知
4.7
本文提出一种新型的智能电表设计方案,采用ti公司超低功耗16位msp430单片机msp430f425作为主控核心,使用内置的液晶驱动器驱动段式液晶作为显示设备。红外通信作为抄表数据传输,系统具有可靠性和实用性的优点。
 光纤激光毛化机器人系统
光纤激光毛化机器人系统 光纤激光毛化机器人系统
格式:pdf
大小:563KB
页数:6P
4.4
光纤激光作为第三代激光技术的代表,具有其他激光器无可比拟的技术优越性和广阔的应用发展空间,将会逐步取代全球大部分高功率co2激光器和绝大部分yag激光器。利用光纤激光器的优点,集成开发了第五代全新的光纤激光机器人毛化系统,系统以光纤激光器为载体,协同机器人及其他设备来完成轧辊毛化作业。光纤激光毛化柔性工作站与传统的co2激光毛化设备相比取得了多项重大突破,如系统采用普通机床代替昂贵的磨床实现毛化功能,不仅节约大量的设备投资费用,并大幅度提高生产效率;系统对轧辊旋转时的轴向跳动容忍度大,毛化速度大幅度提高;光纤激光毛化技术可实现毛化点形貌的任意设计以及毛化点的有序、无序排列;毛化成本大幅度降低,没有三废,是一种绿色制造技术。
一种单向伸缩式管道机器人系统的建模与仿真 一种单向伸缩式管道机器人系统的建模与仿真
格式:pdf
大小:874KB
页数:4P
4.5
介绍了基于单向运动机构的伸缩式管道机器人工作原理,对管道机器人整机系统进行合理简化,得到等效系统模型。根据等效模型,分析直流伺服电机、滚珠丝杠,以及单向运动机构的动力学行为。为了研究系统的输入电压信号和输出的运动速度之间的关系,建立了机器人系统的完整框图模型。利用matlab对机器人系统进行仿真,分析不同输入信号下系统的响应特性,为管道机器人的机构设计和控制器设计提供理论依据。
基于MSP430F677xIEPU片上系统智能电表的研究与应用 基于MSP430F677xIEPU片上系统智能电表的研究与应用
格式:pdf
大小:209KB
页数:3P
4.4
目前,电能表大多采用mcu(microcontrollerunit)作为核心,需要外挂众多的功能模块,存在安全性、稳定性等隐患,难以满足现阶段智能电网对电能表的需求。基于片上系统的智能电表,将众多功能模块集成到片上,提高了智能电表的性能,缩短了开发周期。通过对基于德州仪器推出的msp430f677xiepu智能电表的设计,阐述了基于片上系统的智能电表的优势和应用前景。
电缆管道及电缆敷设隐蔽
格式:pdf
大小:19KB
页数:1P
4.7
电缆管道及电 缆敷设 质量要求 合格 合格 合格 备注 工程名称 河北廊坊新兴产业示范区纵二路道路景观 绿化工程 分项工程名称路灯基础 表c2-5隐蔽工程验收记录 施工单位:中建廊坊新兴产业示范区工程项目经理部 施工标准名称及编号专业技术负责人袁宁 施工图名称及编号项目经理王海强 隐蔽工 程部位 施工单位自查情况监理(建设)单位验收情况 管道的规格、数量、 型号 符合设计及规范要求合格 检 验 内 容 管道材质符合设计及规范要求合格 安装位置及深度符合设计及规范要求合格 年月日 施工单位自查结论 符合设计施工质量验收规范要求,同意隐蔽:进行下步工程施工 监理(建设)单位 验收结论 施工单位项目技术负责人:年月日 监理工程师(建设单位项目负责人):
基于MSP430F4250的温湿度变送器的设计 基于MSP430F4250的温湿度变送器的设计
格式:pdf
大小:854KB
页数:5P
4.5
介绍了一款以msp430f4250单片机为核心的温湿度变送器,在测量温度和湿度时,可同步将测量值变送为2路0~5v的电压输出,也可选择将测量值通过rs-485总线的方式进行传送。为了适应工业现场高温、高湿的测量要求,系统采用电容式湿度传感器,直流24v外部电源,充分利用mcu内部的d/a和定时器模块资源,采用modbus总线协议,结构简单,精度高、效果好。
MSP430F169的电缆管道牵引机器人系统设计相关
文辑推荐
知识推荐
百科推荐


职位:工艺工程师
擅长专业:土建 安装 装饰 市政 园林


