

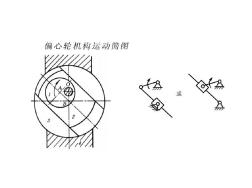
基于MATLAB的偏心轮机构运动仿真系统
格式:pdf
大小:992KB
页数:2P
人气 :83
 4.5
4.5
维普资讯 http://www.cqvip.com 维普资讯 http://www.cqvip.com



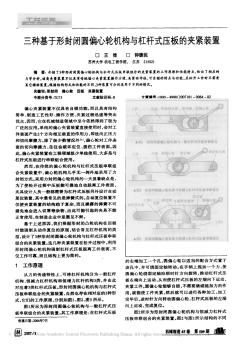
 三种基于形封闭圆偏心轮机构与杠杆式压板的夹紧装置
三种基于形封闭圆偏心轮机构与杠杆式压板的夹紧装置 三种基于形封闭圆偏心轮机构与杠杆式压板的夹紧装置
介绍了3种形封闭田偏心轮机构与杠杆式压板串联组合的夹紧装置的工作原理和性能特点,给出了相应的力学分析。该类夹紧装置不仅具有传统偏心夹紧装置操作方便、夹紧动作快、可自锁的特点与功能,且松开工件时不需要其它辅助装置。根据结构形式和性能的不同,3种装置可分别适用于不同的情况。
编辑推荐下载
气动肌腱驱动的形封闭偏心轮机构和杠杆式压板的绿色夹具 气动肌腱驱动的形封闭偏心轮机构和杠杆式压板的绿色夹具
格式:pdf
大小:451KB
页数:未知
4.6
介绍了一种由气动肌腱驱动的形封闭偏心轮机构与杠杆式压板串联结合的绿色夹具的性能特点和工作原理,给出了相应的力学计算公式。通过计算分析,该夹具将得到一个相当于气动肌腱收缩力约42倍的输出力。该夹具具有结构紧凑、力传递效率高且输出力大等优点。
MATLAB偏心轮机构运动仿真系统热门文档
偏心凸轮式对称夹紧机构 偏心凸轮式对称夹紧机构
格式:pdf
大小:176KB
页数:未知
4.6
介绍了一种以偏心凸轮为驱动的夹紧装置的工作原理及相应力计算公式。它利用凸轮及杠杆的力放大原理实现夹紧。主要应用在工件加工时的夹紧,此机构结构简单,操作方便,夹紧力及稳定性优于传统的偏心凸轮夹紧机构。
基于MATLAB的偏心轮推杆行星传动参数的优化设计 基于MATLAB的偏心轮推杆行星传动参数的优化设计
格式:pdf
大小:276KB
页数:4P
4.8
以偏心轮推杆行星传动为研究对象,应用优化理论对其传动参数进行优化。以实际优化算例显示了优化方法对于改善偏心轮推杆行星传动性能的有效性,为改进偏心轮推杆行星传动的设计方法,提高其产品设计质量及竞争力提供了技术支持。

凸轮机构习题
格式:pdf
大小:1.1MB
页数:25P
4.5
1 一、填空题 [1]___________________________决定了从动杆的运动规律。 [2]凸轮机构中,凸轮基圆半径愈___________,压力角愈___________,机构传动性能愈好。 [3]凸轮机构是由___________________、____________________、____________________ 三个基本构件组成的。 [4]凸轮机构中的压力角是指__________________________________________间的夹角。 [5]凸轮机构常用的从动件运动规律有_______________________________, ________________________________________,______________________________

凸轮机构大作业
格式:pdf
大小:171KB
页数:14P
4.4
大作业(二) 凸轮机构设计 (题号:4—b) 班级:机制02班 学号:2010012407(8) 同组人员:杭程光高源 完成日期:2011-11-15 凸轮机构大作业题目 利用计算机辅助设计完成下列偏置式直动滚子推杆盘形凸轮机构(推杆的移 动副导路位于凸轮盘回转中心的右侧)或摆动滚子推杆盘形凸轮机构的设计,设 计已知数据如下表所示,机构中凸轮沿着逆时针方向做匀速转动。 表1两种凸轮机构的从动件运动规律 直动推杆组题号摆动推杆组题号推程运动规律回程运动规律 1—a,1—b,1—c6—a,6—b,6—c等加速等减速运动正弦加速度运动 2—a,2—b,2—c7—a,7—b,7—c余弦加速度运动五次多项式运动 3—a,3—b,3—c8—a,8—b,8—c五次多项式运动等加速等减速运动 4—a,4—b,4—c9—a,9—b,9—c
挖掘机摇臂机构运动仿真设计 挖掘机摇臂机构运动仿真设计
格式:pdf
大小:4.2MB
页数:6P
4.4
本文以挖掘机摇臂机构为例,探讨在pro/engineer软件环境下,对挖掘机摇臂机构进行虚拟装配、运动仿真及动态分析,为挖掘机概念样机设计、制造方案的设计评估提供有效参考数据,从而提高其设计开发效率。
MATLAB偏心轮机构运动仿真系统精华文档
机械手夹持机构运动与控制的联合仿真 机械手夹持机构运动与控制的联合仿真
格式:pdf
大小:292KB
页数:4P
4.6
设计一种基于凸轮运动原理的简易机械手夹持机构,以期将其应用于机械臂的末端夹持装置和管道攀爬机器人的手爪。建立夹持机构的简化三维模型,在adams环境下对其进行运动学与动力学仿真。通过adams/control接口模块,在simulink中搭建夹持机构的联合仿真控制系统,利用三闭环pid控制方法进行机械系统与控制系统的联合仿真分析。仿真结果表明,所设计的夹持机构系统具有良好的动态响应和轨迹跟踪特性。
大蒜种植机分插机构优化设计及运动仿真 大蒜种植机分插机构优化设计及运动仿真
格式:pdf
大小:246KB
页数:未知
4.4
为了满足大蒜种植的农艺要求,对大蒜种植机的分插机构进行了优化设计。以蒜爪运动的设计轨迹与理论轨迹最近为目标函数,建立分插机构最优化设计模型,利用matlab进行最优化求解,求出分插机构的各个参数。然后利用优化参数在adams中建立分插机构的虚拟样机模型,进行运动学仿真。仿真结果表明:优化后分插机构的轨迹、速度、加速度满足了大蒜的种植要求,为大蒜种植机的研制提供了理论依据。
偏心旋转-摆动式凸轮机构设计 偏心旋转-摆动式凸轮机构设计
格式:pdf
大小:256KB
页数:4P
4.7
运用极坐标矢量法对一种偏心旋转—摆动式凸轮机构的凸轮轮廓曲线进行了设计计算。首先,将机构中的构件用极坐标矢量来表示;然后,根据凸轮机构的矢量图,由从动件的运动规律逐步推导出凸轮从动滚子的运动规律;最后,由从动滚子的运动规律求解出凸轮的实际轮廓。这种方法具有计算精确的特点,能够完成具有复杂运动从动件的凸轮机构的设计。
脚踏式翻书机构的设计及运动仿真 脚踏式翻书机构的设计及运动仿真
格式:pdf
大小:741KB
页数:4P
4.7
借助autocad软件,运用图解法完成了可供残疾人翻书用的脚踏式翻书机构的设计.采用解析法建立该机构的数学模型,将图解法结果代入解析式,验证了设计结果的正确性.最后,运用adams软件建立了该机构模型,并对机构进行了运动学仿真,得到了脚踏式翻书机构翻页头的位移曲线、速度曲线及加速度曲线,验证了所设计的机构满足运动连续性要求,无错位、错序问题,为验证设计方案的合理性和可行性提供了有益的参考.
MATLAB偏心轮机构运动仿真系统最新文档
玻璃器皿套色印花机中槽轮机构运动精度分析 玻璃器皿套色印花机中槽轮机构运动精度分析
格式:pdf
大小:784KB
页数:6P
4.5
以玻璃器皿套色印花机中的槽轮机构为研究对象,分析了影响其运动精度的主要因素以及槽轮机构锁紧弧磨损对工作定位精度的影响,并做出了相应的计算;针对锁紧弧面的磨损提出了改善措施。以上工作对提高设备的印花精度具有重要的意义。
水轮机导水机构检修(A级)
格式:pdf
大小:54KB
页数:8P
4.7
梧州桂江电力有限公司 水轮机导水机构检修 1导水机构大修前的准备(包括安全措施) 1.1机组停机,关闸,流道排水。 1.2调速器液压系统泄压,排油。 1.3轴承润滑油系统排油。 1.4轮毂油系统排油。 1.5测量转轮室与轮叶之间的间隙并做好记录。 1.6在转轮室下方搭设脚手架平台,高度以略低于转轮室分半线为宜。 1.7在安装场准备好放置转轮的钢支墩。 1.8准备好吊具、工器具、枕木及各种备件材料。 2导水机构大修的步骤和方法 2.1拔除所有销钉,拆除水轮机室上半部与外配及尾水管的所有连接螺栓,用 行车将其吊至安装间(此前要先行拆除伸缩节)。 2.2用高压油泵将转子顶起后,将水轮机转轮转至排油孔朝下位置,打开油封, 排除轮毂油。 2.3拆除转轮泄水锥并放置尾水管内。 2.4安装防止轮叶转动的专用工具(制造厂家提供)、专用吊具及调整用具。 2.5拆除轮毂油管和操作油管(拆除前要先拆除受
矿用桥式混匀取料机滚轮机构优化 矿用桥式混匀取料机滚轮机构优化
格式:pdf
大小:240KB
页数:未知
4.8
通过对传统桥式混匀取料机滚轮机构结构形式分析,找出其应用于矿石物料过度磨损及震动等问题的原因,并结合实际工况对其结构及驱动形式进行优化和强度、寿命校验,使其满足设备工况要求并为同类设备设计改造提供借鉴及参考。
凸轮机构大作业机械原理课设
格式:pdf
大小:155KB
页数:10P
4.7
大作业(二) 凸轮机构设计 (题号:7-abc) 班级______________________ 学号______________________ 姓名______________________ 成绩______________________ 同组者______________________ 完成日期2010年12月日 1 目录 凸轮机构设计...................................................................................................................................3 1.题目及原始数据............................................................
行星轮系卷扬机传动机构的运动仿真分析 行星轮系卷扬机传动机构的运动仿真分析
格式:pdf
大小:633KB
页数:4P
4.3
在行星轮系卷扬机传动机构原理的基础上,对传动机构进行运动分析,分析计算传动机构的传动比;运用pro/e软件对其传动机构零部件进行三维实体建模、装配、检查干涉、运动仿真分析,并采用动画模拟行星轮系传动卷扬机的运转过程。在演示回放过程中,仿真跟踪指定的关键点,得出其运动变化曲线。通过计算机仿真与理论计算对比,证实了pro/e中运动仿真的模型正确、结果可信。
运动分离偏心型食品搅拌机轨迹优化及运动仿真 运动分离偏心型食品搅拌机轨迹优化及运动仿真
格式:pdf
大小:234KB
页数:4P
4.3
针对现有食品搅拌机存在的在搅拌器中心附近产生明显的涡流回转区域,使搅拌不均匀、效果变差,使用两个电机分别提供搅拌器的旋转和搅拌桶的提升运动的问题,设计一款运动分离偏心型食品搅拌机,推导出搅拌轨迹的理论方程,并利用matlab软件和solidworks软件进行轨迹优化和运动仿真,结果表明:当s值取为π、k值取为1.25时,搅拌轨迹比较理想。
平底直动从动件凸轮机构推程、回程运动角的最优选配问题 平底直动从动件凸轮机构推程、回程运动角的最优选配问题
格式:pdf
大小:163KB
页数:3P
4.7
关于平底直动从动件盘形凸轮机构,通过深入一步的研究发现:在推程、回程运动角和ф0+ф0′=c(定值)的前提下,客观存在两种最优选配问题——optimum{ф0,ф0r}r0min和optimum{ф0,ф0r}bmin;当取用该两种最优选配时,凸轮基圆半径和平底工作宽度等获得最优之设计结果。上述研究发现,对对象机构的分析与设计具有重要指导意义。
基于FPC的凸轮机构公差设计的研究 基于FPC的凸轮机构公差设计的研究
格式:pdf
大小:317KB
页数:3P
4.8
基于一次产品成功fpc(firstproductcorrect)的原理,研究了凸轮公差优化分配的数学模型及其公差优化设计算法,开发了一套凸轮机构公差优化设计的软件,并进行了实例分析计算;结果表明,该方法保证了凸轮机构公差设计一次达到最优,从而实现了一次产品成功
Pro/Motion运动仿真软件在工程机械机构分析中的应用 Pro/Motion运动仿真软件在工程机械机构分析中的应用
格式:pdf
大小:82KB
页数:未知
4.8
介绍ptc公司的motion运动学分析软件的应用特点,通过液压挖掘工作装置运动仿真的实例阐述和如何建模及应注意的问题。
电控共轨高压泵凸轮机构动力学仿真及优化设计 电控共轨高压泵凸轮机构动力学仿真及优化设计
格式:pdf
大小:677KB
页数:4P
4.7
根据电控高压共轨系统供油泵的工作特点,运用凸轮机构动力学原理建立了凸轮机构动力学多自由度模型,并利用simulink建立了该凸轮机构的仿真模型,参照bosch泵凸轮机构的结构参数,计算了凸轮从动件-柱塞的实际位移与其理论位移的误差.通过仿真分析,研究各设计参数对凸轮运动规律的影响,为电控高压泵的优化设计提供了良好的理论依据.
MATLAB偏心轮机构运动仿真系统相关
文辑推荐
知识推荐
百科推荐


职位:投标预算员
擅长专业:土建 安装 装饰 市政 园林


