自动泊车系统
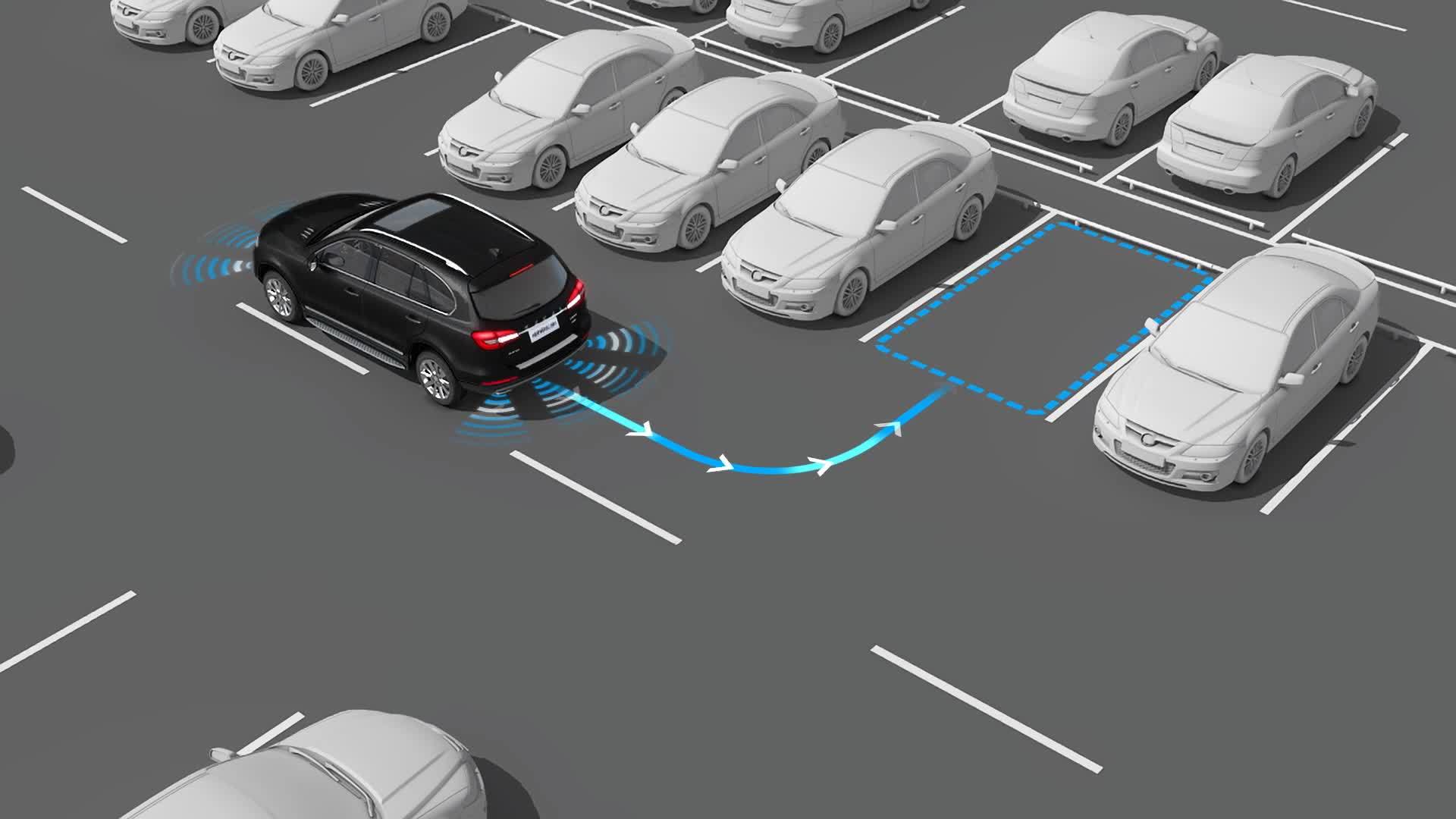
顾名思义,自动泊车系统就是不用人工干预,自动停车入位的系统。这套系统在国外已经并不罕见,目前国内有大众途安 帕萨特 帕萨特cc 斯柯达昊锐、丰田皇冠奔驰、宝马、雷克萨斯LS等车型配备。
自动泊车系统,可以使汽车自动地以正确的停靠位泊车,该系统包括一环境数据采集系统、一中央处理器和一车辆策略控制系统,所述的环境数据采集系统包括一图像采集系统和一车载距离探测系统。
自动泊车系统基本信息
| 中文名称 | 自动泊车系统 | 性质 | 软件 |
|---|---|---|---|
| 功能 | 自动停车入位 | 操控 | 方向及动力支援方面 |
| 时间 | 2001年 | 地点 | 上海 |
自动泊车系统造价信息
自动泊车系统常见问题
-
1、入口控制设备4000元2、探测和识别设备3000元 3、进入执行设备15000元 上海现代通用
-
自动停车系统顾名思义:就是不用人工干预,自动停车入位的系统。可以使汽车自动地以正确的停靠位泊车,该系统包括一环境数据系统、一中央处理器和一车辆策略控制系统,所述的环境数据系统包括一图像系统和一车载距离...
-
九路泊车走的是高配低价路线,新品牌,需要打开市场,目前价格在同类产品中属于中下等,据说产品没有噪音、摆动的问题,这款停车设备就这两点特别烦人,能解决这个问题,看来应该不错。造价得根据你需要的车位数和配...
自动泊车系统文献

 应用于停车场泊车系统中的车载系统
应用于停车场泊车系统中的车载系统
大城市停车难现象非常严重,其直接后果是增加了道路的无效交通流,造成道路交通拥挤.目前,国内很多停车场都有配套的泊车导航系统,该系统是解决停车难、缓解交通拥挤、帮助司机快速找到停车位的有效方法,但是,现在市面上配备有相应的泊车车载系统的车却很少.本文针对目前现状,旨在研究一种廉价的应用于停车场泊车导航系统中的车载系统.

 个人地下泊车位租赁合同
个人地下泊车位租赁合同
个人地下泊车位租赁合同——车位租赁合同范本,个人地下泊车位租赁合同,WORD格式,共6页。 地下停车位租赁合同;甲方:乙方:,身份证号码:,身份证号码:;甲方同意将其所有的本合同项下的停车位(以下称本停;为□停车位/□墙体/□其他:停车位处于适租状...
目前应用的自动泊车系统都需要倒车雷达辅助测算车位。驾驶员选择的路边车位的长度一定要大于汽车长度1.5米以上,自动泊车系统才能自动检测出车位的存在,如果车位长度过短,则自动泊车系统不能检测出车位的存在。
这种汽车自动泊车系统确实使路边停车更加容易。但是现有的自动泊车汽车并不是全自动的,驾驶员仍然必须踩着制动踏板控制车速(汽车的怠速足以将车驶入停车位,无需踩加速踏板)。在汽车自动泊车系统辅助停车入位的过程中,需要驾驶员时刻盯紧汽车的倒车雷达显示,和左右后视镜。严格掌控好车速,以免在停车入围的工程中发生碰撞。
汽车自动泊车系统为很多不熟悉倒车停车入位的新手提供了便利,但是目前的汽车自动泊车系统人不能做到全自动。停车入位过程中汽车行进的速度还需要驾驶员自行控制。因此,即便有汽车自动泊车系统的辅助,驾驶员停车入位也不能马虎大意。随着未来科技的发展,相信不久的将来汽车自动泊车系统一定会意过来全自动时代。
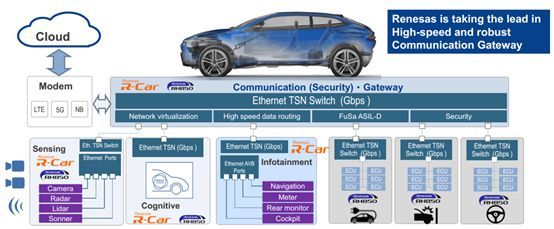
进入汽车智能化时代后,座舱电子也在快速变化,HUD、仪表、Infotainment、T-Box、ADAS系统、360度全景、自动泊车系统等不再是一个个孤岛,而是互相联系为一个整体。进入L3时代,驾驶员行为监测可能成为必备的功能,面部识别、眼球追踪、眨眼次数跟踪等将引入机器视觉和深度学习算法。而L4时代则必备V2X,座舱电子的复杂程度和运算资源需求量暴增。
为了应对这些变化,域控制器、EAVB或TSN网络、自适应AUTOSAR将成为标配。座舱IC领域主要玩家,德州仪器的Jacinto 7、NXP的i.mx8、瑞萨的R-CARM3/H3、高通的820A/835A、英特尔的GO/AtomA3900,都将域控制器作为核心技术。关于座舱电子域控制器的叫法有多种,伟世通称之为SmartCore、德尔福称之为Integrated Cockpit Controller (ICC),德国大陆称之为IntegratedInterior Platform(IIP),德州仪器称之为Integrated Cockpit,NXP称之为eCockpit,瑞萨称之为ConnectedCockpit,QNX还是称之为Cockpit DomainController。
座舱电子域包括HUD、仪表和Infotainment三个最主要的组成部分。HUD很快会演变为AR HUD,将ADAS和部分导航功能投射到挡风玻璃上,诸如ACC、行人识别、LDW、路线提示、路口转弯提示、变道提示、剩余电量、可行驶里程等。HUD将成为非常实用的功能,在L3和L4时代成为标配。毫无疑问,这将消耗大量的运算资源。
未来的汽车电子架构
域控制器离不开车载以太网,目前车载以太网可以简单分为三类,一类是EthernetAVB(TSN)、一类是车载诊断的ISO13400标准100BASE-TX,一类是时间触发以太网。时间触发以太网 ,由 Kopetz 等人首先提出的,它是另一个基于以太网的实时车载通信或工业网络的候选。它的目的旨在允许时间触发实时同步通信与低优先级的事件触发以太网消息的共存。这个技术通过应用一个时间精度为 60µs 的时分多路方案得以在现有的 802.3 以太网上实施。时间触发以太网支持三个不同的通信类型,分别为:时间触发( TT),速度限制( RC),和尽力传(BE)。时间触发通信需要比其它类型更高的优先级,反之速度限制通信保证提供一个预设的带宽级别。最大努力通信遵循标准以太网程序。时间触发的一个主要优势是时间触发开关也允许抢占,这意味着,低优先级的消息可被中断并存储在开关缓存中以允许时间触发消息抢占优先级。时间触发以太网通过汽车工程师协会实现 SAE AS6802 标准并由 TTTech 进一步推广。
Ethernet AVB是一种弱实时性网络,也因此在2012年11月EAVB小组改为TSN小组。不过目前TSN的标准还不算完备,整体成本也比较高,对实时性要求不高的座舱电子领域,Ethernet AVB或许会在相当长一段时间内具备竞争力,由Ethernet AVB迁移到TSN也比较容易,之前的研发成果也能保留。
Ethernet AVB 技术是在传统以太网络的基础上,使用精准时钟同步,通过保障带宽来限制传输延迟,提供高级别服务质量以支持各种基于音视频的媒体应用。 AVB 技术以IEEE1588 同步协议和 Zeroconf 零配置协议为基础,可以将音视频流数据和传统以太网控制信号一起进行传输。宝马于2013 发布的 X5 模型车上首次应用了以太网技术,应用于一套 360 度全景泊车系统。
Ethernet AVB 网络包括 AVB 终端节点和AVB 网桥, 各个 AVB 系统通过网桥桥接在一起,组成 AVB 网络。网络内各个节点都必须支持 AVB 协议族。为了实现同时传输音视频流数据和传统以太网数据, Ethernet AVB 技术融合了高层的通信解决方案,主要包括: IEEE802.1AS 精准时钟定时和同步(Precision TimeProtocol, PTP)、 IEEE802.1Qat流预留协议 (Stream Reservation Protocol, SRP) 和IEEE802.1Qav:队列及转发协议(Queuing and Forwarding Protocol,Qav),以及其他相应协议。上述的三个协议整合到一起,这也就给在局域网中传送实时的多媒体数据流提供了可行性。不过这也只是提供了在可以控制的延时和足够带宽的条件下提出的解决方案,真正在实际中应用还需要以下这几种上层的通信方案IEEE 1722: 音视频桥接传输协议( Audio/Video BridgingTransport Protocol, AVBTP)(二层),IEEE1733:实时传输协议( Real-time Transport Protocol, RTP)(三层),IEEE 802.1BA: AVB 配置文件。
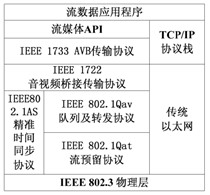
上面是Ethernet AVB的协议栈。
协议 |
内容 |
功能 |
IEEE802.1Qbu,IEEE802.3br |
转发和排队 |
帧抢占 |
IEEE802.1Qbv |
转发和排队 |
增强的流量调度 |
IEEE802.1Qca |
资源预留 |
路径控制和预留 |
IEEE802.1Qcc |
资源配置 |
增强功能和性能改进 |
IEEE802.1Qci |
转发和排队 |
流量过滤和策略 |
IEEE802.1CB |
无缝冗余 |
可靠的帧复制和消除 |
IEEE802.1Qch |
队列和整形 |
循环排队和整形 |
IEEE802.1Qcr |
队列和整形 |
异步流量整形 |
IEEE802.1Qcj |
Auto-attch PBB |
|
IEEE802.1Qcp |
Bridges and Bridged Networks(YANG Model) |
|
IEEE802.1CM |
前向回传(TSN for Fronthaul) |
|
IEEE802.1CS |
Registration |
TSN与EAVB相比主要增加了资源管理和流量控制的内容。
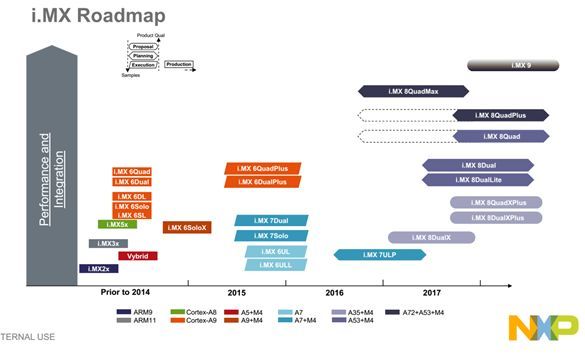
上图为NXP i.MX系列产品路线图,i.MX6系列产品是有史以来最成功的汽车处理器,i.MX6系列产品应用最为广泛。集成电路设计公司要提前市场4-6年设计产品,因为一款集成电路从构思到正式量产应用最少需要5年时间,也就是说集成电路设计公司要按5年后的市场来设计产品。i.MX7是针对低功耗可穿戴电子而设计的,可惜飞思卡尔对可穿戴市场高估了,i.MX7无用武之地。

i.MX8系列有目前最顶级的A72内核,比R-CAR H3的A57内核还要略高,不过R-CAR H3比i.MX8晚了两年多。
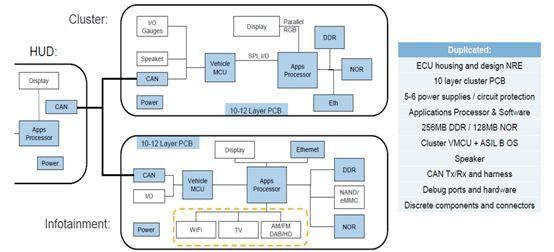
传统座舱域电子设计如上图,需要3个ECU。
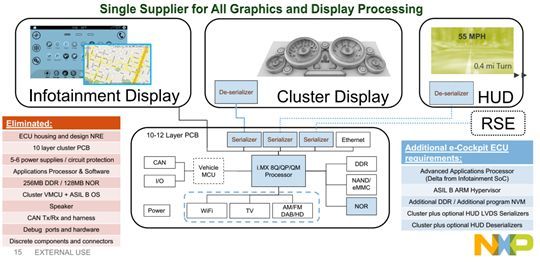
显示输出方面,NXP仍然推荐低成本的解串行设计,也就是美信的GMSL或德州仪器的FPDLINK,目前解串行设计支撑720P的分辨率还是无任何压力,德州仪器明确表示未来FPDLINK会支持4K,GMSL还不得而知,当然你也可以选择以太网输出。i.MX8可以支持4路1080P输出,通常此时NXP推荐使用车载以太网交换,也就是EAVB。
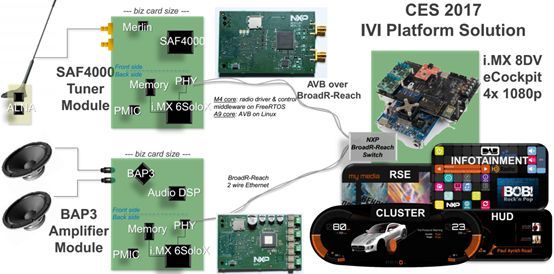
上图为NXP在2017年CES大展上的样品。

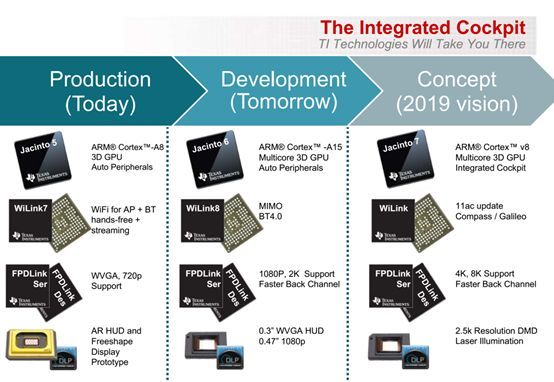
上图为德州仪器对未来座舱电子技术发展的预测。
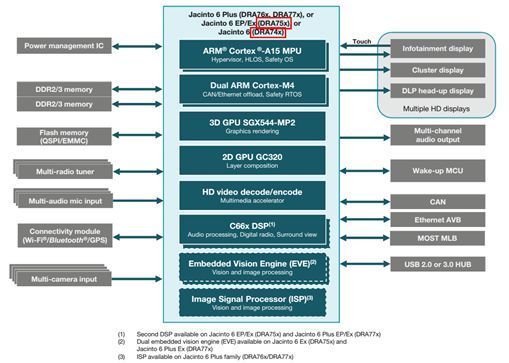
上图为德州仪器的路线图,不过目前Jacinto 7还未露面,也没有公开资料介绍。目前主要还是Jacinto 6,不过Jacinto 6最高级的DRA77x已经可以实现座舱电子域控制器的性能。原本以DRA74x为核心处理器的Infotainment设计都开始转向DRA77x的座舱电子域控制器设计,比较典型的有奥迪MIB II Plus。此外上汽与阿里合资的斑马、宝马、福特Sync和蔚来都有可能导入。
在奥迪e-tron quattro概念车上,奥迪展示了基于座舱电子域的设计。

这个设计有人称之为MIB2+,采用德州仪器DRA76x和英伟达的K1做主芯片。此系统还集成了基于ISP的360度全景。可能已经用EAVB取代了原本奥迪一直使用的MOST总线。

瑞萨的R-CAR H3于2015年12月2日正式推出,量产时间为2018年3月。R-CAR H3是目前运算性能最强的汽车ARM架构SoC,内含4个A57内核,4个A53内核,1个R7安全内核。采用台积电16纳米FinFET工艺制造,这是ARM架构汽车SoC里制造工艺最先进的芯片(英特尔的Atom A3900是14纳米工艺),即便是尚未量产的i.MX8,也不过是28纳米FD SOI工艺。先进制程的优点是同样的运算性能功耗更低,可靠性更高,缺点是价格昂贵,16纳米比28纳米在晶圆方面成本增加了50%,这也是NXP仍然坚持28纳米的原因。NXP认为16纳米工艺性价比不够高,NXP将在i.MX9上使用14纳米工艺。德州仪器的Jacinto6都是28纳米工艺,考虑到德州仪器自有晶圆厂,Jacinto7可能也使用16纳米工艺或20纳米工艺,英特尔在车载Atom系列还是22纳米工艺,英伟达的Tegra K1也不过20纳米工艺。唯一比较强的是高通的Snapdragon 820是14纳米工艺,不过虽然是14纳米,但是三星的LPP工艺,还是不如台积电的16纳米工艺。
R-CAR H3的硬核也比较多,还有GX6650 GPU,die尺寸巨大,达到111.36平方毫米,因此也成为目前价格最高的汽车SoC。R-CAR H3达到ASIL-B级标准,NXP的S32V234达到ASIL-C级标准,不过i.MX8也是ASIL-B级标准。座舱电子达到B级即可,Jacinto6和Snapdraon820都只过了AEC-Q100标准。
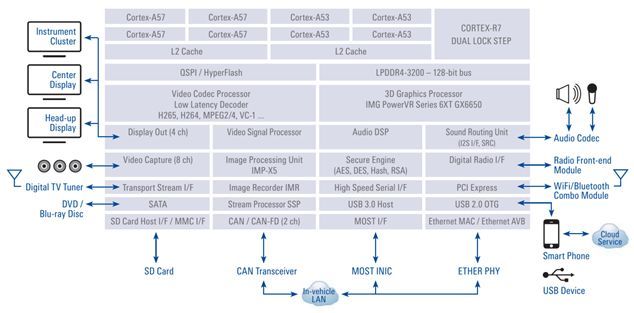
上图为R-CAR H3内部框架图,可以对应4路输出。R-CAR H3价格高昂,2016年10月,瑞萨推出H3的缩水版,即M3,M3比H3减少了两个A57内核,GPU从GX6650降低为GX6250。但制造工艺仍然是台积电的16纳米FinFET。
英特尔的A3900系列则是采用了最先进的14纳米工艺。英特尔的运算性能要比R-CAR H3可能还要强,不仅完全对应座舱电子的仪表、Infotainment和HUD,还能够实现L2级预警类ADAS,诸如360度环视系统、LDW、FCW。不过如此高端的车肯定不会是只有L2级的警告,英特尔有些性能过剩。当然也支持后座娱乐系统。
英特尔A3900系列产品参数表
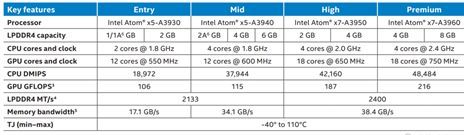
后起之秀高通的Snapdragon 820A也值得一提,这款芯片首发于2016年1月,脱胎自手机用的Snapdragon820,A代表Automotive,汽车级。毫无疑问这款芯片对安卓系统的支持是最好的。这款芯片被伟世通选中作为其第二代座舱电子域SmartCore控制器的核心芯片,将与某欧洲车厂(可能是PSA)在2018年上半年正式推向市场,支持HUD、全液晶仪表(1920*720分辨率)、基于安卓的Infotainment,只用一片820A。三块显示之间可以任意通讯切换,此外虚拟机配置工具也可以基于PC,不需要昂贵的开发工具。820A强大之处在于拥有高通Gobi 9x15多模Modem,最高可支持CAT-12。可以省下部分通讯模块的成本,其他方面也相当优秀,4核心1.5GHz的Krait CPU,Hexagon QDSP6型DSP(支持深度学习哟),Adreno 320型GPU。全面支持FPDLINK。缺点也有,就是接口不足,只有一个以太网,两个CAN和一个LIN,跟车载专用SoC比要少很多。
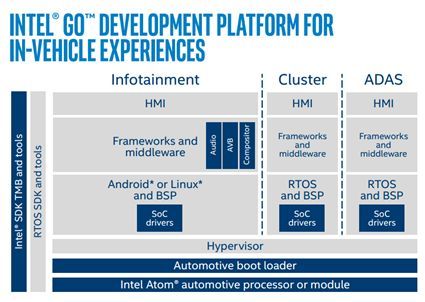
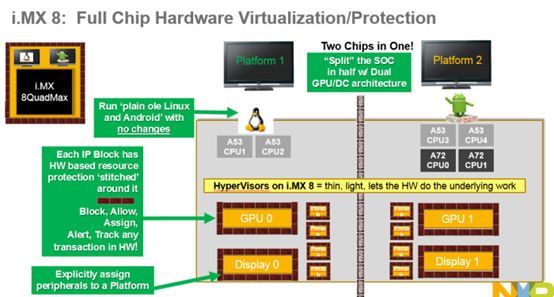
座舱电子域控制器的软件部分主要是虚拟机,在ARM v8架构未推出前,主要都是基于软件的虚拟机技术,通过在已有操作系统上不断的加载新的虚拟机,从而达到一机同时控制多个系统的目的。不过,由于是主要基于软件,因此其相应的系统代码数量也会随着虚拟机的增加成指数倍的增加,系统出错几率也成倍提升,而对于主打安全性的汽车来讲是不太合适的,特别是最近兴起的ISO26262标准。同时软件工作量持续增加,也增加了成本。ARM v8架构的A53和A57推出后,基于硬件的虚拟机技术后来居上。每个系统都会有相对应的芯片内核来进行控制,就不会造成软件系统的相互堆叠,极大的减少了系统代码的编译量,同时设定隔离池,把对安全要求比较高的对车辆控制部分放在安全等级高的操作系统(至少达到ASIL-B级)里,进而保证了整个汽车系统的安全和可靠性,并降低了成本。把第三方应用放在开放的实时性要求不高的安卓系统里。

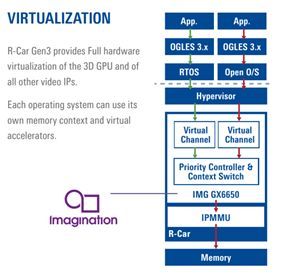
瑞萨的R-CAR H3则实现了GPU和其他视频IP的全硬件虚拟化,最大限度利用GPU资源,降低软件复杂度。
德州仪器则从OMAP 5时代就开始运用这种芯片级虚拟化,英特尔的A3900也支持芯片级虚拟化。

主办单位




不同的自动泊车系统采用不同的方法来检测汽车周围的物体。有些在汽车前后保险杠四周装上了感应器,它们既可以充当发送器,也可以充当接收器。这些感应器会发送信号,当信号碰到车身周边的障碍物时会反射回来。然后,车上的计算机会利用其接收信号所需的时间来确定障碍物的位置。其他一些系统则使用安装在保险杠上的摄像头或雷达来检测障碍物。但最终结果都是一样的:汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后将车子驶入停车位。
自动泊车系统相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 高真空焊烟净化器
- 机械工程及自动化
- 夹管阀
- 工业机械臂
- 美国3I种植系统
- 混凝土硬化地坪
- 半自动变速器
- 自动化机械
- 用户通信终端设备原理与技能训练
- 自动控制系统
- 发动机自动启停
- 结构构件吊装
- 热风焊接法施工
- 耐磨地坪
- 水洗石
- 洁便器
- 智能建筑火灾自动报警与消防联动系统设计及应用效果
- 有线电视广播系统运行维护规程编制情况和宣贯要点
- 在项目成本控制中的实践与探索工程项目成本管理系统
- 再谈VRV空调系统设计与施工中有关问题的解决方法
- 中国电工技术学会电力系统控制与保护专业委员会成立
- 用于制冷系统稳定运行时制冷剂分布测试的新方法
- 张力式电子围栏周界防范报警系统设计原理及应用现状
- 智能化的供配电系统设计解决方案
- 变频控制多联式空调系统
- 一拖多变频空调产品测试系统与室外机通信接口
- 在楼宇自控系统设计中如何选择最佳的电动调节阀口径
- 中国工商银行广东省分行信息化办公系统的设计与实现
- 新型转轮除湿与双级热泵耦合空调系统及系统设计
- 智能建筑综合布线系统安装分项检验批质量验收记录表
- 智能化空调系统节能技术在5A级大酒店工程中的应用
- 改造ZJ19卷接机组电控系统
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
拆边机
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
电梯平层准确度
建设部关于开展城市规划动态监测工作的通知
广州利好来电气有限公司
四川中泽盛世招标代理有限公司