pelco
派尔高是业界久负盛名的专业研发和生产视频安保系统的全球领先的知名企业,在视频监控领域,其产品几乎成为高品质的代名词。
pelco基本信息
| 外文名称 | PELCO | 公司名称 | 派尔高 |
|---|---|---|---|
| 总部地点 | 美国南加州 | 成立时间 | 1987年6月1日 |
| 经营范围 | 视频监控系统产品制造 | 公司性质 | 外商独资 |
pelco造价信息
pelco常见问题
-
1.广州市东蒲电子科技有限公司 2.深圳施普特电子有限公司 3.北京剑弛安科科技有限公司 4.北京天宇海视科技有限公司 5.北京剑弛安科科技有限公司 6.深圳市昊宸安防设备有限公司 等等
pelco文献

 BOSCH_PELCO协议转换器的设计及应用
BOSCH_PELCO协议转换器的设计及应用
针对闭路电视监控系统在实际组网过程中遇到的不同厂家的设备之间协议不一致的情况,提出了基于AT89C2051单片机的起协议转换作用的设计方案,并详细介绍了协议转换的原理、通信系统的硬件构成以及软件实现方法。通过现场的严格实验运行,证明了该方法具有通信可靠、效率高、投资少等优点。
PELCO-D:
用于矩阵和其它设备之间的通信协议
数据格式:1位起始位、8位数据、1位停止位,无校验位。波特率:2400B/S
pelco-pPELCO-P
数据格式
1位起始位、8位数据、1位停止位,无校验位。波特率:9600B/S
命令格式
字节1 | 字节2 | 字节3 | 字节4 | 字节5 | 字节6 | 字节7 | 字节8 |
STX | 地址码 | 指令码1 | 指令码2 | 数据码1 | 数据码2 | ETX | 校验码 |
1.该协议中所有数值都为十六进制数 2.STX始终为A0H
3.地址码为摄像机的逻辑地址号,地址范围:00H–1FH 4.指令码表示不同的动作
5.数据码1、2分别表示水平、垂直方向速度(00-3FH),在有关预制点的操作时,数据码2表示预制点值 6.ETX始终为AFH
7.校验码(XOR sum of Bytes 1-6) = 字节1 ^ 字节2 ^ 字节3 ^ 字节4 ^ 字节5 ^ 字节6
以地址码0x01为例:
{0xa0,0x01,0x00,0x08,0x00,0x30,0xaf,0x39,}//上
{0xa0,0x01,0x00,0x10,0x00,0x30,0xaf,0x21,}//下
{0xa0,0x01,0x00,0x04,0x10,0x00,0xaf,0x15,}//左
{0xa0,0x01,0x00,0x02,0x10,0x00,0xaf,0x13,}//右
{0xa0,0x01,0x00,0x40,0x00,0x00,0xaf,0x41,}//变倍短
{0xa0,0x01,0x00,0x20,0x00,0x00,0xaf,0x21,}//变倍长
{0xa0,0x01,0x02,0x00,0x00,0x00,0xaf,0x03,}//聚焦近
{0xa0,0x01,0x01,0x00,0x00,0x00,0xaf,0x00,}//聚焦远
{0xa0,0x01,0x08,0x00,0x00,0x00,0xaf,0x09,}//光圈小
{0xa0,0x01,0x04,0x00,0x00,0x00,0xaf,0x05,}//光圈大
无命令字发送//灯光关 无命令字发送//灯光开
{0xa0,0x01,0x00,0x96,0x00,0x20,0xaf,0xb7,}//自动巡航
{0xa0,0x01,0x00,0x99,0x00,0x20,0xaf,0xb8,}//关闭自动巡航 {0xa0,0x01,0x00,0x07,0x00,0x01,0xaf,0x07,}//转至预置点001 {0xa0,0x01,0x00,0x03,0x00,0x01,0xaf,0x03,}//设置预置点001 {0xa0,0x01,0x00,0x05,0x00,0x01,0xaf,0x01,}//删除预置点001
以上对应的停命令均是(上下左右、变倍、聚焦、光圈均有停命令): {0xa0,0x01,0x00,0x00,0x00,0x00,0xaf,0x01,}
数据位1到4的意义如下
字节1 | 字节2 | 字节3 | 字节4 | 字节5 | 字节6 | 字节7 |
同步字节 | 地址码 | 指令码1 | 指令码2 | 数据码1 | 数据码2 | 校验码 |
1.该协议中所有数值都为十六进制数 2.同步字节始终为FFH
3.地址码为摄像机的逻辑地址号,地址范围:00H–FFH 4.指令码表示不同的动作
5.数据码1、2分别表示水平、垂直方向速度(00-3FH),FFH表示"turbo"速度
6.校验码 = MOD[(字节2 + 字节3 + 字节4 + 字节5 + 字节6)/100H]
以地址码0x01为例:
{0xff,0x01,0x00,0x08,0x00,0xff,0x08,}//上
{0xff,0x01,0x00,0x10,0x00,0xff,0x10,}//下
{0xff,0x01,0x00,0x04,0xff,0x00,0x04,}//左
{0xff,0x01,0x00,0x02,0xff,0x00,0x02,}//右
{0xff,0x01,0x00,0x20,0x00,0x00,0x21,}//变倍短
{0xff,0x01,0x00,0x40,0x00,0x00,0x41,}//变倍长
{0xff,0x01,0x00,0x80,0x00,0x00,0x81,}//聚焦近
{0xff,0x01,0x01,0x00,0x00,0x00,0x02,}//聚焦远
{0xff,0x01,0x02,0x00,0x00,0x00,0x03,}//光圈小
{0xff,0x01,0x04,0x00,0x00,0x00,0x05,}//光圈大
{0xff,0x01,0x00,0x0b,0x00,0x01,0x0d,}//灯光关
{0xff,0x01,0x00,0x09,0x00,0x01,0x0b,}//灯光开
{0xff,0x01,0x00,0x07,0x00,0x01,0x09,}//转至预置点001
{0xff,0x01,0x00,0x03,0x00,0x01,0x05,}//设置预置点001
{0xff,0x01,0x00,0x05,0x00,0x01,0x07,}//删除预置点001
以上对应的停命令均是:
{0xff,0x01,0x00,0x00,0x00,0x00,0x01,}//停命令
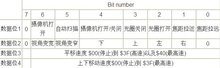
Sence码与Bit4和Bit3有关。在Bit4和Bit3为1的情况下,如果Sence码为1,则命令就是自动扫描和和摄像机打开;如果Sence码为0,则命令就是手动扫描和摄像机关闭。当然如果Bit4或Bit3为0的话那命令就无效了。
数据1表示镜头左右平移的速度,数值从$00(停止)到$3F(高速),另外还有一个值是$FF,表示最高速。
数据2表示镜头上下移动的速度,数值从$00(停止)到$3F(最高速)。
校验码是指Byte2到Byte6这5个数的和(若超过255则除以256然后取余数)。
pelco相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 天名精属
- YWZ液位计
- 外测液位计
- 磁性浮子式液位计
- 比较组织学彩色图谱
- 磁浮球液位计
- 浮球液位计开关
- ARM寻址方式
- 磁性翻柱液位计
- 高频雷达液位计
- 浮子式液位计
- 激光液位计
- 复杂指令集
- UHZ-517C系列侧装式磁性翻柱液位计
- 顶装导向型磁翻柱液位计
- 磁翻球液位计
- 基于压电堆驱动器的喷嘴挡板式气体控制阀
- 电气工程及其自动化特色专业建设探索
- 分形DGS单元结构设计及其在微带电路中的应用
- 磷铵技术改造五大磷肥工程的建议
- 以大豆油多元醇制备的硬质聚氨酯泡沫塑料的性能
- 逆变TIG焊机接触引弧电路的设计(引弧电路)
- 预制砌块(砖、石)挡土墙工程砌体施工安全技术交底
- 应用模糊数学理论对公路工程建设项目方案的综合评价
- 引嫩工程扩建区土壤水盐动态与防治土壤盐碱措施
- 中华华丹雨、污水管道沟槽开挖专项施工方案教学教材
- 中国工程图学学会成立工程与制造系统集成化分会
- 中国吹制玻璃行业市场前景分析预测年度报告(目录)
- 可替代现有隔热保温材料的新型材料
- 医院病房楼工程施工装饰装修工程施工控制
- 在生活中构筑自然——河南天旺园林工程有限公司剪影
- 中国机械工程学会授予材料热处理工程师资格人员名单
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
广东国咨招标有限公司
Excel 数据处理与分析应用大全
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
当代建筑大师
广西北缆电缆有限公司
拆边机
大山槟榔
上海地铁维护保障有限公司通号分公司
甘肃中维国际招标有限公司
舌花雏菊
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
华润燃气(上海)有限公司
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
苏州弘创招投标代理有限公司