





研究三维空间机器人路径规划问题,由于系统求解时间较长、过早失去解的多样性、易陷入局部最优、个体适应度较差等问题,通过构建三维工作空间模型、引入变异算子和搜索无碰路径策略来解决,提出适宜于三维机器人路径规划的一种变异算子蚁群算法(Mutation Operator Ant Colony Algorithm,MOACA)。MOACA是一种关于模型构造的启发式搜索算法,算法在改进启发式函数设计、选择概率确定、信息素更新策略等基础上,引入逆转变异和插入变异算子,通过选择逆转点反序排列部分路径节点和随机插入路径节点的方法搜索无碰路径,对蚁群算法进行了局部优化改良。仿真结果表明,MOACA在搜索路径、收敛时间、适应度等方面较传统蚁群算法有明显改善,算法是有效可行的。
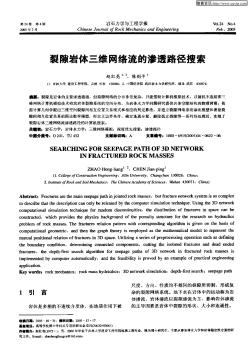
裂隙岩体三维网络流的渗透路径搜索——裂隙是岩体的主要渗透通道,但裂隙网络的分布非常复杂,只能借助计算机模拟技术。以随机不连续面三 维网络计算机模拟技术构筑岩体裂隙系统的空间分布,为岩体水力学问题研究提供岩体空隙结构的物理背景;依 据计算几何学提...
热门知识
三维路径规划-
话题: 工程造价158****2697
-
话题: 工程造价150****5188
-
话题: 工程造价158****6644
-
话题: 工程造价wenziwenzi1
精华知识
三维路径规划-
话题: 工程造价150****8180
-
话题: 项目管理suifengyiye
-
话题: 工程造价150****4628
-
话题: 工程造价153****1381
-
话题: 工程造价137****1068
最新知识
三维路径规划-
话题: 工程造价158****0717
-
话题: 工程造价153****6996
-
话题: 工程造价151****8333
-
话题: 工程造价158****7586
-
话题: 项目管理lkcisen00001
相关问答
三维路径规划-
话题: 造价软件zhou683083
-
话题: 造价软件dingdinggl
三维路径规划相关专题
- 开发项目前期成本预估
- 康桥长郡的项目简介
- 科技项目申报材料怎么写
- 科研项目立项程序是什么
- 可竞争措施项目
- 块料零星项目
- 矿山项目融资有哪些渠道
- 矿山项目前期准备工作
- 昆仑置业有哪些住宅项目
- 扩建项目实施的流程是什么
- 植物园地域规划建设
- 以遗产传承为核心的都江堰市城乡灾后重建规划与实施
- 引绰济辽工程远距离输水隧洞TBM施工三维数值模拟
- 中国城市规划协会规划展示专业委员会年会
- 云计算模型在船体复杂结构件装配和三维建模中的应用
- 智能楼宇弱电系统工程规划实施
- 农田灌溉渠系配套工程建设规划
- 中国城市规划设计院舟曲灾后重建规划工作组简报
- 中国电动机制造产业分析及未来五年投资规划报告
- 智慧城市理念下高职院校建筑类专业教学改革路径探析
- 制定、优化和监控产品线路标规划的流程、方法和工具
- 以构建兰州特色山水园林骨架为例谈生态城市规划策略
- 中国隧道建设市场分析及未来五年发展规划报告
- 中国稳压二极管产业调查及未来五年投资规划报告
- 应用Lingo非线性规划软件的钻孔灌注桩优化设计
- 优质结构工程创优规划方案
- 在滨江古城景观规划设计中对其地方文脉的保护与应用