




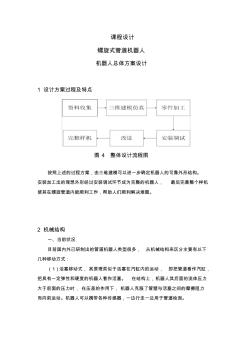
课程设计 螺旋式管道机器人 机器人总体方案设计 1 设计方案过程及特点 按照上述的过程方案,由三维建模可以进一步确定机器人的可靠外形结构。 安装加工出的理想外形经过安装调试环节成为完整的机器人, 最后完善整个样机 使其在螺旋管道内能顺利工作,帮助人们顺利解决难题。 2 机械结构 一、当前状况 目前国内外已研制出的管道机器人类型很多, 从机械结构来区分主要有以下 几种移动方式: (1)活塞移动式, 其原理类似于活塞在汽缸内的运动, 即把管道看作汽缸, 把具有一定弹性和硬度的机器人看作活塞。 在结构上,机器人其后面的流体压力 大于前面的压力时, 在压差的作用下, 机器人克服了管壁与活塞之间的摩擦阻力 而向前运动。机器人可以携带各种传感器,一边行走一边用于管道检测。 图 4 整体设计流程图 (2)滚轮移动式,利用滚轮驱动式的行走结构,以电机作原动机, 为了增 加牵引力,一般采用多轮驱动式,由于

热门知识
管道机器人设计图纸-
话题: 装修工程fengzhihen
精华知识
管道机器人设计图纸-
话题: 装修工程whd751748098
最新知识
管道机器人设计图纸-
话题: 装修工程linyuanhui
-
话题: 建筑设计tuxingsifang
管道机器人设计图纸相关专题
- 怎么看管道图纸
- 怎样审管道外网图纸
- 化工管道支架图纸怎么看
- 管道图纸如何看
- 管道系统图中的重叠怎么画
- 管道图纸fx是什么意思
- 管道支架图集怎么看
- 管道修改后怎么画图··
- 管道支架吊架图集
- 管道支架吊架03S402图集
- 张峰水库2号倒虹预应力钢筒混凝土管道安装施工工艺
- 中国哈尔滨国际水处理给排水设备及泵阀管道展会概况
- 在用工业管道定期检验规程.20030601doc
- 中低压燃气管道工程质量控制及常见问题处理教学提纲
- 中国纸面石膏板产业市场现状及投资分析报告
- 通风预埋管道的防护密闭专项工程质量验收记录表
- 峪道河灌区节水改造管道输水与渠道输水方案比较分析
- 中国热水管道增压泵价格行业十大立式自吸泵品牌首选
- 以管道形状的改变来提高风机系统流量的节能方法
- 原油和天然气输送管道穿跨越工程设计规范跨越工程.
- 医疗垃圾破碎机破碎装置的结构设计含全套CAD图纸
- 中国变频管道泵型号
- 脱硫石膏气流煅烧工艺在生产纸面石膏板中的应用
- 工艺场站及阀室地上管道及设备外防腐层材料技术规格书
- 关于排烟积灰水平管道来流绕过管道附着概率模型
- 光固化改性环氧玻璃钢防护层在定向钻穿越管道上应用
- 广东广州长度8663市政管道372#工程造价指标