超高层钢结构复杂空间坐标测量定位工法工法特点
目录
- 超高层钢结构复杂空间坐标测量定位工法工法特点
- 超高层钢结构复杂空间坐标测量定位工法造价信息
- 超高层钢结构复杂空间坐标测量定位工法形成原因
- 超高层钢结构复杂空间坐标测量定位工法操作原理
- 超高层钢结构复杂空间坐标测量定位工法工法特点常见问题
- 超高层钢结构复杂空间坐标测量定位工法材料设备
- 超高层钢结构复杂空间坐标测量定位工法质量控制
- 超高层钢结构复杂空间坐标测量定位工法安全措施
- 超高层钢结构复杂空间坐标测量定位工法环保措施
- 超高层钢结构复杂空间坐标测量定位工法效益分析
- 超高层钢结构复杂空间坐标测量定位工法应用实例
- 超高层钢结构复杂空间坐标测量定位工法荣誉表彰
- 超高层钢结构复杂空间坐标测量定位工法工法特点文献
- 论文推荐| 晏磊:极坐标数字摄影测量理论与空间信息坐标体系初探
- 大地测量坐标系地心坐标系
- 三坐标测量机三坐标测量
1.《超高层钢结构复杂空间坐标测量定位工法》的施工特点是:采用全站仪进行空间点的三维坐标定位,形成整个空间三维坐标系。
2.与传统的测量方法相比,《超高层钢结构复杂空间坐标测量定位工法》施工测量方便,测量精度高,施工安全,施工速度快,有利于提高技术经济和社会效益。
超高层钢结构复杂空间坐标测量定位工法造价信息
随着中国建筑业的发展,高层、超高层钢结构工程越来越多,施工测量贯穿在钢结构施工的整个过程中,测量的精度直接影响着钢结构的安装质量。中铁建设集团有限公司承建的中关村金融中心工程为150米高的全钢结构,工程造型独特,施工测量复杂,外轮廓为双曲面结构,竖向为半径750米的圆弧,平面圆弧最大半径为100米。钢柱全部为三维坐标定位,核心筒以外的定位轴线为弧线。通常的施工测量方法在该工程中已不适用。通过研究、施工,完成了工程的施工测量工作,并形成《超高层钢结构复杂空间坐标测量定位工法》。
超高层钢结构复杂空间坐标测量定位工法适用范围
《超高层钢结构复杂空间坐标测量定位工法》适用于所有高层、超高层钢结构工程的施工测量放线。
超高层钢结构复杂空间坐标测量定位工法工艺原理
《超高层钢结构复杂空间坐标测量定位工法》的工艺原理叙述如下:
平面控制网的建立采用内控和外控相结合的方法,平面控制采用内控法施工、外控法校核的方法。钢柱定位采用先进的全站仪进行三维坐标定位。钢柱柱头标高、钢柱垂直度、钢柱间的水平距离层层进行测定和校验。
超高层钢结构复杂空间坐标测量定位工法施工工艺
-
工艺流程
《超高层钢结构复杂空间坐标测量定位工法》的施工工艺流程:测量准备→控制网建立(包括平面控制网和高程控制网的建立)→地脚螺栓三维坐标测量定位→测量放线控制→外控法控制钢柱的位置→钢柱安装测量→钢柱安装质量测量。
-
操作要点
《超高层钢结构复杂空间坐标测量定位工法》的操作要点如下:
一、测量准备
1.所有测量仪器准备齐全,并按《中华人民共和国计量法实施细则》规定检验合格;
2.施工图纸审核完毕,并完成设计交底;
3.专业测绘设计单位提供的工程水准测量成果、高程测量成果等资料齐全;
4.现场桩位交接完毕,并做好桩位保护,资料齐全;
5.定位依据的复核;
6.用坐标反算法核对所给点的边长D和方位角ф;
7.用符合校测法所给出的水准点进行校核。
二、控制网建立
1.平面控制网建立
1)根据每个工程的特点,为方便施工测量,提高施测效率,施工测量可分为一个或两个区域进行。通常两个区域的划分为∶核心筒的施工测量是一个单独区域,核心筒外的钢柱施工测量是另一个区域。根据每个工程的高度和工程的特点,可采用内控法或内控法和外控法相结合的方法。
2)核心筒控制网建立∶
(1)外控网建立;将核心筒最外边的四条轴线分别向外扩1米∶形成核心简外控平面网,见图1。
(2)内控网建立∶从首层(±0.000以上)开始往上的所有层,必须要在核心简每层顶板上预留孔洞以便用激光铅垂仪进行测设。a、b、c、d四个轴线的交点构建该工程的内控网,每层板上预留4个200×200的激光铅垂仪用的孔洞,用来投测施工时使用,见图2。
3)外围钢柱测量平面控制网建立∶根据每个工程的构件布置情况,可以建立一个或多个平面外控网。中关村金融中心工程南北柱子为斜柱,东西两侧为直柱,因此南北和东西分别建立两个平面外控制网,见图3、图4。
|
|
|
2.高程控制网的建立
1)用校核无误后的水准点向现场较永久的建筑物上外测该工程的±0.000,用红色油漆作"▲"标记,作为该工程的高程依据。为提高精度,在引测过程中必须使用前后视等长的原则。
2)在施工过程中,必须经常进行现场高程点的复测工作,确保引测的高程点正确无误。并在现场布设4~5个同等高程的标高点作为地下地上高程的依据,要在距离该工程一定位置的地方埋设至少3个水准基准点组成高程点组。
三、地脚螺栓埋设测量
在地脚螺栓的顶端临时安装一定位钢板,与预埋钢板平行并与地脚螺栓垂直。利用架设在柱纵、横轴线交点上的两台经纬仪垂直交汇,定位钢板上的纵横轴线允许误差为0.3毫米。在灌注基础混凝土前,进行检查调整纵、横轴线与设计位置的允许误差为0.3毫米。
四、测量放线控制
1.平面控制∶
1)首层底板放线∶首先校测控制桩无误后,在控制桩架经纬仪,精密对中后,以盘左盘右取中法,把控制点投测到首层板面上,并进行闭合校核,闭合差符合测角中误差±10",边长相对中误差1:10000范围内校核无误后,进行细部点投测,经自检、互检,报监理工程师验线合格后,依据轴线控制网图和施工分区图做控制桩点,作为竖向控制基点。控制桩点做法,用冲击钻把桩点钻出,然后把钢筋埋入,并用钢锯条锯出十字划在钢筋上作出标记。
2)标准层测量工作与钢结构施工关系(以一柱二层为例)∶钢柱安装(先校正标高,再校正位移、最后调整钢柱的垂直偏差)→测量校正→下层框架梁→上层框架梁→测量→螺栓初拧→下层次梁、小梁→下层压型钢板堆放→上层次梁、小梁→测量校正→高强度螺栓终拧→压型钢板铺设(楼板50毫米控制线)→钢筋、混凝土施工。
2.±0.000以上部位轴线控制∶
1)该工程属于超高层建筑(檐高150米),采用内控外控相结合的方法。结构垂直度要求非常严格,四周测量场地比较狭小。以首层轴线控制网中基点作竖向投测时,应特别注意以下三点:
(1)事先应严格校正好仪器,投测时,严格定平度盘水准管。
(2)尽量以首层轴线为准作后视。
(3)取盘左、盘右向上投测的平均位置。
2)从首层顶板上开始按留洞平面图所示位置每层顶板留出4个200×200的方洞,作为用激光经纬仪向上传递各层轴线的依据。
3)留设此施工洞时,位置必须正确,测量人员在每层浇混凝土前应对各洞定位进行校核。用线坠校核上下层控制线间的误差,用钢卷尺闭合校核轴线控制线间的距离。在首层顶板上就把各控制轴线引测到较远的马路上,然后每隔6层用激光经纬仪加弯管目镜串中法向楼层投测相应轴线作为闭合,保证高层竖向轴线正确。内控法与外控法共同操作,相互校核。保证层层有校核。
4)当建筑物施工到一定高度时,外控制和远方轴线标志不太好利用,此时必须以内控制为主要依据。测量员必须注意,外控制、轴线标志和内控制之间的关系必须保持一致,控制点之间距离误差要求达到±2毫米,测角中误差±5"。
3.标高控制∶
1)首先校测±0.000标高点,然后将±0.000抄测到建筑物外墙四周并引测到电梯井,用墨斗弹出,闭合差在±3毫米以内。
2)用50米钢卷尺直接从±0.000点沿电梯井和核心筒结构底板预留洞铅直拉出各层距结构板面500毫米的统一高程点,当两点高程传递到同一施工面时,用水准仪对传递高程点进行闭合校测,取其三个高程点传递的平均值为准,作为各层结构高程的控制依据,在工作面上大面积进行抄平。
3)在每层楼板施工完毕后,将激光铅垂仪放置于首层底板上已埋设好的控制点a(或b、c、d)上,将激光铅垂仪精确对中、整平,然后调焦望远镜,照准施工层上的接收靶,利用无线对讲机通知并指挥施工层上操作接收靶的测量人员,使接收靶上正交的坐标中心点同激光铅垂仪十字丝交点完全重合。此时,固定好接收靶,为了消除仪器自身存在的系统误差,再将激光铅垂仪平转90°方向,重新观测仪器十字丝交点是否与接收靶的正交坐标交点重合,如果重合,说明仪器本身没有存在系统误差。这样接收靶上的正交坐标交点即为控制点a的向上投影点;用同样的方法将其余各控制点分别投测到施工层楼板上,同样得到相对应的投影点。
4)控制点投测到施工层楼板上之后,将全站仪分别置于各投测点上,校测各个角及相邻两投测点间距是否同首层±0.000底板上对应的各个角度及控制距离相符,待角度、距离校测后,将投影点用墨线连起来,然后以控制线为基准,用检定过的50米钢卷尺,将各条轴线投测于楼板上。最后以轴线为基准测出与钢柱所在轴线的借用1米控制线,作为下一节钢柱校正的依据。
五、外控法控制钢柱的位置(以中关村金融中心工程为例)
1.利用图3和图4作为外控法的轴线控制依据。
2.南北钢柱定位,见图3。
1)用全站仪把o点坐标定出来,在o点放置一台DJD2A级的电子经纬仪,作为塔楼南北钢柱的主控点。定出A、B、C控制线,根据图纸尺寸把TR2~TR7各轴线与c轴的交点定出来,同样把TR8~TR14轴线与a轴的交点定出来。
2)DJD2A级电子经纬仪架设在o点,用来控制TRBs轴和TRGs轴上钢柱的垂直干TR1~TR14轴方向的位置。莱卡全站仪(TCA2003)架设在TR1~TR14轴与a、c轴线的交点上,用来控制钢柱的轴线径向位置。
3.东西两侧钢柱定位,见图4。
1)用全站仪把o点坐标定出来,在o点放置一台DJD2A级的电子经纬仪,作为TRBs轴和TRGs轴上钢柱的主控点。把TR1、TR7、TR8、TR14、TRC~TRF、TRJ~TRN轴线上的各个坐标点同样用全站仪定出来。
2)用两台DJD2A级电子经纬仪架设在任意一根柱子的两个轴线上,用正交法即可把钢柱位置精确定位出来。
六、钢柱安装测量
1.构件进场复测
1)在安装测量前,对柱、梁、支撑等主要构件尺寸与中线位置进行复核,构件的外形与几何尺寸的偏差符合《建筑钢结构质量验收规范》的规定。
2)根据流水分区的划分以及钢柱吊装顺序,在需要吊装的钢柱上面根据钢柱原有的冲眼标出轴线或中心线,并用红色三角作出标记,以便校测用。见图5。在吊装前,必须对钢柱的长度、及截面几何尺寸作检查,以作为吊装测量控制标高的依据。
2.定位复测
在基础混凝土面层上第一节钢柱安装前,要对钢柱地脚螺栓部位的柱十字定位轴线控制点组成的柱格网进行检查、调整,其误差小于1毫米。安装时柱底面的十字轴线对准地脚螺栓部位的柱十字定位轴线。其误差小于0.5毫米。
3.钢柱垂直度校正
1)将检定过的两台DJD2A级电子经纬仪分别置于相互垂直的轴线控制网上,精确对中,整平。后视前方墨线(控制轴线),然后纵向转动望远镜,照准钢柱头上操作人员的标志,并读数,与设计控制值相对比后,判断方向并指挥吊装人员,对钢柱进行校正。直至在两个方向上均校正在正确垂直位置后,将四个方向的缆风绳拉紧,然后通知吊装人员进行焊接。
2)由于焊接时,考虑到焊接使得钢骨收缩,而使得柱子偏移,所以必须随时监测并同时校正垂直度,钢柱校正方法如图6所示。
4.钢柱顶位移校核
在下一节钢柱吊装前,必须对前一节钢柱顶的偏移进行复测。复测方法用楼板上已经投测的轴线及轴线控制线,量出控制线与钢柱中心的尺寸,根据实测数据整理成测量报告,上报各有关部门,并进行数据分析。以备在下一节钢柱吊装时进行平面调整,以免误差积累而影响总的垂直度。
5.钢柱安装复测
1)当钢柱初校完后,需安装钢梁。梁柱之间用高强螺栓连接,在连接安装过程中,将会影响钢柱的垂直度,因此必须安装校检。
2)螺栓初拧之后。需要终拧。终拧同样将会对钢柱垂直度有所影响,为了保证钢柱安装精度的要求,需作进一步的校测。校测后的测量数据作为节点焊接参考依据。
3)终拧之后、下道工艺是焊接的焊缝将会收缩。因此,焊接之后,必须再一次校测,校测后记录下来的测量数据,主要为下一层钢柱安装提供调整依据。
6.其他测定
在进行柱、梁、支撑等构件安装时,应以柱为准,调整梁和支撑,以确保建筑物整体的铅直度在焊接时必须观测与记录以下项目∶
1)柱与梁焊缝收缩引起柱身铅直度的测定;
2)柱的日照温差变形的测定值;
3)塔吊锚固在结构上,对结构铅直度的测定;
4)柱身受风力影响的测定。
七、钢结构安装质量检验
1.钢柱头标高检验方法
用校核无误的当前施工层的控制标高作为基点,用水准仪将低于柱顶300毫米的标高线投测到钢柱上,并弹上墨线。然后用经过检定的钢尺,量出墨线到柱顶的实际尺寸并记录下来。将实测后的数据整理上报,见图7、图8。
|
|
|
2.首层以上钢柱垂直度检验校正
1)将首层基准轴线投测到钢梁面上,所投测的线距离梁上的基准设计轴线1米;
2)校测梁上基准线的平面位置、尺寸、关系,经校测符合精度后,方可使用;
3)将经纬仪架设在梁面基准线上,后视基准线方向向上投测,钢柱顶部卡有读数标尺;
4)根据仪器与轴线的间距关系,在标尺上读出相应的尺寸,以此来校正钢柱。
3.钢柱之间水平距离的检验校正
1)当钢柱吊装完毕后,经过垂直度校正和标高校正完成后,需要进行平面位置校正;
2)AC2003全站仪可以对任意多的点距离联测,利用全站仪的这一程序,来对钢柱水平面位置进行校验;
3)首先根据设计图纸,在计算机中把任意两个钢柱的平面位置距离计算出来,如图9所示。
4)用全站仪架设在任意位置(必需能够看到两个钢柱),使用距离联测程序测量出两个钢柱间的实测距离。把测量数据保存起来,作为钢柱校测的依据。
超高层钢结构复杂空间坐标测量定位工法工法特点常见问题
-
单元拼装,分块吊装,分块安装,如果你有足够条件可以地面拼装,整体吊装
-
建筑物定位应由建设单位根据规划部门要求委托有资格的测量单位现场实测并埋设定位桩,施工单位根据定位桩制作辅助控制桩并加以保护工程完工后还要进行小区平面实测
《超高层钢结构复杂空间坐标测量定位工法》所用的材料设备见表1。
| 序号 |
名称 |
型号与规格 |
数量 |
精度 |
| 1 2 3 4 5 6 7 8 9 10 |
莱卡全站仪 电子经纬仪 激光铅垂仪 自动安平水准仪 铝合金塔尺 光原对点器 棱镜 钢卷尺 管形测力计 对讲机 |
TCA2003 DJD2A D2J2 NAL132 5米 ╱ ╱ 50米 LTZ-200N ╱ |
1台 3台 2台 2台 2把 2台 20个 2把 2只 4部 |
0.5" 2" 1/45000 ±1毫米 1毫米 ╱ ╱ 1毫米 ╱ ╱ |
参考资料:
《超高层钢结构复杂空间坐标测量定位工法》的质量控制见表2。
| 序号 |
项目 |
图示 |
允许偏差(毫米) |
检查方法 |
|
| 1 |
钢结构定位轴线 |
|
L/20000且≤3.0 |
用经纬仪和钢尺检查 |
|
| 2 |
柱子定位轴线 |
|
1.0 |
用经纬仪和钢尺检查 |
|
| 3 |
地脚螺栓位移 |
|
2.0 |
用拉线和钢尺检查 |
|
| 4 |
底层柱柱底轴线 对定位轴线偏移 |
|
3.0 |
用吊线和钢尺检查 |
|
| 5 |
上柱和下柱的扭转 |
|
3.0 |
用钢尺检查 |
|
| 6 |
底层柱基准点标高 |
|
±2.0 |
用水准仪检查 |
|
| 7 |
单节柱的垂直度 |
|
h/100且≤10.0 |
用经纬仪或吊线和钢尺检查 |
|
| 8 |
同一层柱柱顶标高之差 |
|
5.0 |
用水准仅检查 |
|
| 9 |
同一根梁两端水平度 |
|
L/1000且≤10.0 |
用水准仪和钢尺检查 |
|
| 10 |
压型钢板在钢梁上的排列错位 |
|
15.0 |
用直尺和钢尺检查 |
|
| 11 |
建筑物整体平面弯曲 |
|
L/1500且≤25.0 |
用经纬仪或拉线和钢尺检查 |
|
| 12 |
建筑物的整体重直度 |
|
(H/2500) 10且≤50.0 |
用经韩仪检查 |
|
| 13 |
建筑物总高度 |
按相对标高安装 |
|
Σ(△h △z △w) |
用钢尺检查 |
| 按设计标高安装 |
H/1000,且≤30 -H/1000,且≤-30 |
用钢尺检查 |
|||
采用《超高层钢结构复杂空间坐标测量定位工法》施工时,除应执行国家、地方的各项安全施工的规定外,尚应遵守注意下列事项:
1.做好边坡的移位观测(符合测量规范DBJ 01-21-95-12-3);
2.做好楼层的沉降观测,按测量规范三等水准测量的技术要求观测(DBJ 01-21-95/12、2、1);
3.做好塔吊基础的沉降观测,及时进行数据整理,发现问题及时汇报和处理;
4.测量人员施工必须遵守项目的各项安全管理规定;
5.高空作业的测量人员必须戴好安全带;
6.测量时,必须将测量仪器架设在安全、平稳的地方。
《超高层钢结构复杂空间坐标测量定位工法》的环保措施如下:
1.施工测量的各种废弃物不得乱扔乱放(如墨瓶等);
2.测量用的油漆、墨汁等必须按规定使用,不得随意乱涂或溢洒;
3.雨天或炎热天气施工时,必须采用遮阳和雨伞保护测量仪器,防止雨淋或太阳直射。
《超高层钢结构复杂空间坐标测量定位工法》技术先进,采用先进的全站仪进行空间三维坐标定位,测量精度高、速度快,提高了钢构件安装的质量和速度,减少了钢构件测量校核的时间,且施工测量与钢结构施工同时交叉进行,不占用施工工期。对于超过100米的高层钢结构工程,直接产生的经济效益在10万元以上。
注:施工费用以2005-2006年施工材料价格计算
《超高层钢结构复杂空间坐标测量定位工法》的应用实例如下:
中铁建设集团有限公司承建的150米高钢结构工程——中关村金融中心工程应用该工法,四角柱整体垂直度偏差最大为8毫米,主体结构曲面偏差最大为7毫米,总高度的偏差为9毫米,均小于规范的要求。为6个月完成15000吨的钢结构安装提供了有利的保证。
《超高层钢结构复杂空间坐标测量定位工法》获得铁道部优秀工法一等奖。
2008年01月31日,中华人民共和国住房和城乡建设部发布《关于公布2005-2006年度国家级工法的通知》建质[2008]22号,《超高层钢结构复杂空间坐标测量定位工法》被评定为2005-2006年度国家一级工法。 2100433B
超高层钢结构复杂空间坐标测量定位工法工法特点文献

 超高层钢结构复杂空间坐标测量定位技术
超高层钢结构复杂空间坐标测量定位技术
中关村金融中心工程塔楼为150 m高的全钢结构,工程造型独特,施工测量复杂,全外轮廓为世界上独一无二的双曲面结构,竖向为半径750 m的圆弧,平面圆弧最大半径为100 m。钢柱全部为三维坐标定位,钢柱每四层一折形成弧线形,核心筒以外的定位轴线全部为弧线。传统的轴线定位和钢结构安装测量控制技术在本工程中不再适用。通过认真研究,开发了独特的空间三维坐标测量定位技术,保证了工程的施工进度和质量。对该工程的坐标定位技术进行了阐述。
 复杂多变空间刚架节点构造测量定位施工工法
复杂多变空间刚架节点构造测量定位施工工法
复杂多变空间刚架节点构造测量定位施工工法——随着我国建筑行业的飞速发展,建筑造型更加强调与环境和地域文化的融合,并使建筑物形体越来越美观、复杂以及富有个性化。为了满足上述要求,应用复杂多变空间异形钢结构的建筑物越来越普遍,而采用多个分支节点和...
极坐标数字摄影测量理论与空间信息坐标体系初探
晏磊1 , 陈瑞1 , 孙岩标2
1. 北京大学空间信息集成与3S工程应用北京市重点实验室, 北京 100871;
2. 伦敦大学学院土木、环境与地理工程学院, 伦敦 WCIE 6BT, 英国
收稿日期:2018-02-01;修回日期:2018-04-12
基金项目:国家重大计划研发项目(2017YFB0503004);国家自然科学基金(41571432;61101157;41050110441);国家863计划(2007AA09Z201);国家支撑计划项目课题(2011BAH12B06)
第一作者简介:晏磊(1956—), 男, 博士, 教授, 研究方向为高分辨率成像与遥感定标; 偏振与无人机仿生遥感; 时空信息控制与仿生智能摄影测量。E-mail:lyan@pku.edu.cn
摘要:空间信息获取手段的多样性与数据处理的严密数学法则约束不变性,是航空航天新技术发展伴生的新矛盾。例如推扫式、变角摆头凝视、变焦距成像,航空平台动姿态、大角度飞行,高重叠、短基线效应,给处理收敛性、效率、精度、抗干扰性等带来挑战。为此基于仿生机器视差角原理和航空航天平台到地面成像的锥体投影本质,引入极坐标数学表达。文章探求了高分辨率影像稀疏性特征及病态奇异性和非收敛性破解方法,建立了一套视差角矢量极坐标处理数学模型,初步形成了极坐标理论;该方法在近景摄影测量与自由网光束法平差模型中,精度、效率、抗干扰性均有数量级提高,并在国际公开源代码3年以上,应用良好;在航空摄影测量及绝对网平差模型试验中进行了有效性验证,初步证明性能优于直角坐标处理方法;最后,给出多种应用、航天平台动姿态高阶解算特征,可望为航空航天多尺度全姿态空间信息(获取-组织-管理-存储-处理-应用)极坐标新体系构建奠定基础。
关键词:仿生机器视觉智能摄影测量极坐标矢量空间信息, 病态奇异收敛精度
A Preliminary Study on the Theory of Polar Coordinates Digital Photogrammetry and the Coordinate System of Spatial Information
YAN Lei1 , CHEN Rui1 , SUN Yanbiao2
Abstract: The diversity of means of obtaining space information and the tight constraints of the strict mathematical rules of data processing are the new contradictions associated with the development of the new aeronautics and astronautics technology.For example, push broom, variable angle swing staring, zoom imaging, aerial platform attitude, large angle flight, high overlap and short baseline effect, which bring severe challenges to convergence, efficiency, accuracy and anti-interference.Based on the principle of the bionic machine parallax angle and the essence of pyramidal projection of the aerial space platform to the surface, the mathematical expression of polar coordinates is introduced.This paper has explored the solution to the causes of the high resolution image sparsity ill conditioned singularity and nonconvergence, built a set of mathematical models for the polar coordinates processing of the parallax angular vector, and formed the polar information theory of spatial information initially.This method has been improved in the range of accuracy, efficiency and anti-interference order of magnitude in close-range photogrammetry and the free net bundle adjustment model, and publish open source code in the world more than three years, which has a good reaction.The effectiveness is verified in the aero photogrammetry and absolute network adjustment model experiment, and the performance is better than the Descartes coordinate processing method.Finally, the high-order solution characteristics of various applications and spaceflight platforms are given, which is expected to lay the foundation for the construction of the new polar coordinates system for aerospace multi-scale all attitude spatial information (acquisition organization management storage processing application).
Key words: bionic machine visionintelligent photogrammetrypolar coordinates vectorspatial informationastringencyconvergence precision
1 问题引出
数字摄影测量技术在各行各业中发挥着越来越重要的作用,主要包括近景摄影测量、航空摄影测量和航天摄影测量。
从我国摄影测量发展进程上看,主要有两个学术思路:一是以王之卓等为奠基的直角坐标系摄影测量理论[1],服务于现有近景和常规摄影测量有效,至今遥感测绘对地观测领域几乎全部沿用这个体系;二是基于射线角的极坐标摄影测量方法,20世纪50年代唐山铁道学院罗河[2]和中国地质大学的周卡[3],从射线角出发证实了对直角坐标系矩阵病态解算有改观,对高阶奇异的现象有所缓解,但没有成功地从数学原理上加以系统推导和证明,亦没有上升到理论创建的高度,致使其后期的逐步消沉。近10余年,本文针对直角坐标系摄影测量方法在航空航天和近景摄影测量新技术处理中遇到的解算效率降低、精度下降甚至发散等问题,基于国外仿生机器视觉原理,引入了极坐标方法,初步为构建面向航空航天的极坐标摄影测量的相关理论体系[4-7]奠定了基础。
1.1 摄影测量解算中的病态问题
航天观测直角坐标系垂直参量Z相对于其他两个平面参量具有式(1)特征

(1)
因此,当三轴具有相同量级的增量值时(例如同一相机拍摄空间影像具有三轴相同的分辨率),Z轴的相对增量远小于平面相对增量。
(2)
这是三维影像在Z轴方向交角极小时产生病态奇异性的根源,即高程增量相对于平面增量相比非常微小。当然此时的微小值不是绝对的0值,因此三维相对误差计算矩阵尽管满秩不相关,但实质上Z轴相对增量趋于零值会导致法方程具有极弱正定性[8],成为引发计算发散的根源。
为了避免发散,有3种方法可以降低病态奇异性。
其一,可以“放大”Z轴相对增量相应量级,这样与平面相对参量相“适应”,消除奇异性;但同时把Z轴高程误差也同量级放大,“淹没”了高分辨率的精准辨识力,影像失去应有的高分辨率精度水平。
其二,布设大量地面控制点,以降低病态性,但成本巨大且违背了不要或少要地面控制点的产业发展原则,且在境外及特殊领域无法实测地面控制点。
其三,选择数学方法。首先人们尝试局部数学的改进。例如20世纪90年代提出的Inverse depth方法[9-12],即1/Z方法。实际上是它针对较复杂的近景摄影测量中无穷远特征点在XYZ坐标中Z无穷大的问题,采用特征点深度的倒数,以及相机中心到特征点观测向量的方位角与高程角,同时结合在全局坐标系中被称为“锚点”的相机中心来表达,可以实现法方程非奇异,但例如近景摄影测量中可能某个特征点离相机很近,采用此方法表示与解算会使法方程奇异,解算发散。
分析可知,直角坐标系X、Y、Z采用长度单位米(m)作为度量,相对比较会产生式(1)与式(2)的微小和极大数值的多量级差异,使得法方程病态。
由此引入极坐标。将平面ΔX、ΔY增量m的度量单位转化为弧度增量Δθ、Δφ度量单位,ΔZ以Δr表征而保留m的度量单位如下

(3)
极坐标系表达方法避免了原有法方程中的微小值,从源端去除法方程的病态奇异性,根本上避免发散。例如上述1/Z方法远近特征点的表达局限性问题,避免由于过远或过近特征点的存在造成发散。
1.2 极坐标理论试验系统及分析
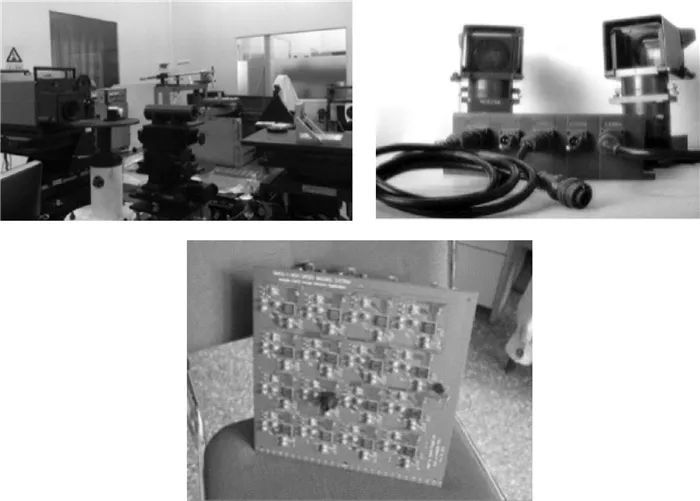
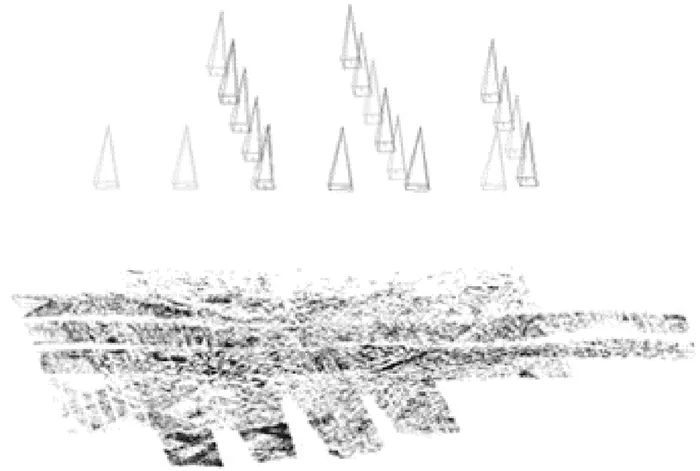
本文基于极坐标方法,采用多种极坐标视差角空间仪器试验系统(图 1),以探索直角坐标影像处理机制面对长距离或高重叠投影等易导致交会角偏小,方程易呈病态奇异性问题;推扫式、变角摆头凝视、变焦成像、动姿态、大角度等新技术引发的更易为极坐标体系破解的问题;以及快速收敛和三维测量的需求,进而为探索空间信息极坐标方法体系奠定基础。
|
| 图 1 多种极坐标视差角(变角标定,双角推扫,高重叠4×4探测阵列)空间仪器试验系统Fig. 1Spatial instrument test system for different polar coordinates of parallax angle (variable angle calibration, double angle push, high overlap 4×4 detection array) |
其次,从观测过程看,空间信息以角度为特征,其来自于地球的经纬度,最终的产品也以经纬度的方式进行表达,由于历史原因,中间一般采用直角坐标系进行处理。若能直接采用极坐标系,将使得地物信息的表达更为直接。尤其是,高分辨率使得经纬直线表达的方式越来越需要以弧长来精化表征,即恰恰以矢径与微增量夹角表达更直接,从而降低由于三维直角分解原始参量而引发的计算源端误差。
其三,基于2n及整型一维数组的全球经纬度剖分网格[13-15]的“地球空间网格与编码”已被公开颁布为国家军用标准GJB 8896—2017,它是基于经纬度坐标和地心坐标体系来定义的空间信息组织、管理和存储的标准,对军民两用都具有强制性,因而可以用极坐标表达,如果再结合本文的极坐标空间信息获取和处理方法,有望为新一代空间信息获取-组织-管理-存储-处理-应用一体化的极坐标体系构建确立基础。
2 极坐标理论方法
本节从数学上证明极坐标系统避免解算的非收敛性,并通过理论证明极坐标矢量系统解算能使复杂姿态和大角度场景下影像解算收敛,并达到精度-效率-抗干扰性统一。
2.1 矢量坐标体系对非收敛性破解
由于二维场景中的成像原理与三维场景中类似且更易于理解分析,因此,讨论二维场景情况。为与直角坐标数据直接相连,在本文提及的极坐标系统中,表示相机姿态的外方位元素仍然沿用在地面直角坐标系统中的表达,而极坐标系的建立针对影像中的像点,确定其主锚点和副锚点,以及主副锚点间基线方向和长度后,在此极坐标系统中表达像点坐标。
图 2[16]中,假设相机1中心为坐标系原点。2台相机间距为‖t‖常量,在局部坐标系下的方向角为ϕ1、ϕ2,相机基线的方向角为ϕt,因此,相机1的位置表示为(ϕ1, 0, 0),同理,相机2的位置为(ϕ2, ‖t‖cos ϕt, ‖t‖sin ϕt)。在二维场景下,选取第一个相机为特征点主锚点,在直角坐标系下可以表示为
(4)
|
| 图 2 二维场景的成像原理Fig. 2Imaging principle of two dimensional scene |
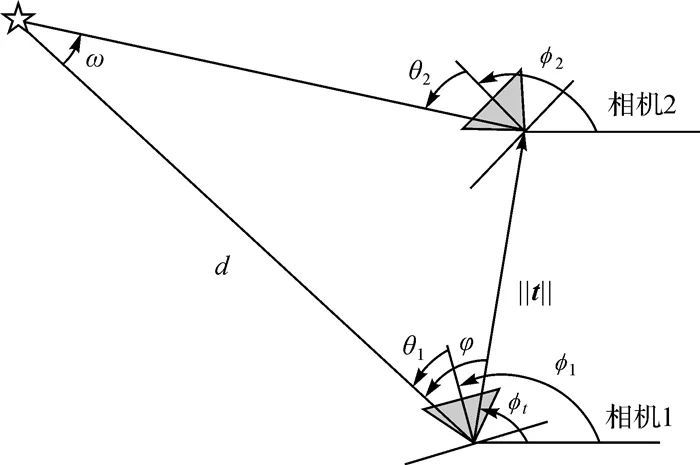
d表示特征点到主锚点的深度信息;θ表示特征点在局部坐标系下的方向角,等价于
(5)
θ1表示特征点在其主锚点上的观测角的真值。
在极坐标系下,特征点可以表示为
(6)
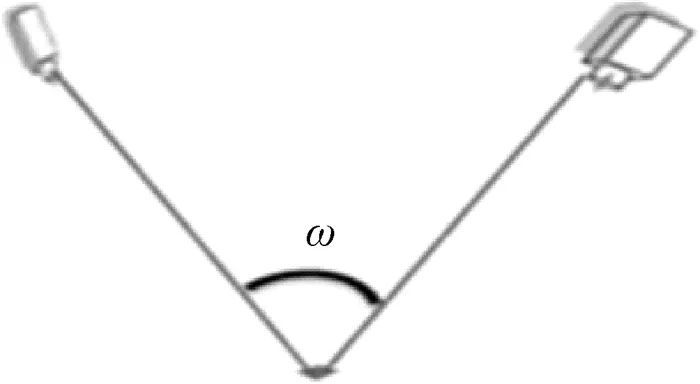
ω表示主锚点和副锚点到像点光线间的夹角,称之为“视差角”。
为与三维光束法平差模型中以二维图像特征点作为观测值相区别,在二维场景中,特征点在两个相机上的观测量为两个局部观测角,即θ1、θ2,见图 2。光束法平差的数学本质为非线性最小二乘优化问题[17-19],迭代求解的公式可以表示为
(7)
假设所有观测误差为高斯白噪声,可以认为是等权的,即Qz-1=E,式(7)可以简化为
(8)
JTJ为法方程,当问题收敛时,JTJ表示为信息矩阵,即变量的不确定度。式(8)表明,法方程的奇异性直接影响光束法平差的收敛性。若法方程奇异,法方程无法求逆,则利用Gauss-Newton无法进行数值计算,此时光束法平差问题发散。
直角参数空间光束法平差的观测量为θ1、θ2,变量为(θ, d),其最小二乘优化问题可以表示为
(9)
f1(θ, d)和f2(θ, d)分别为特征点在两个相机上的观测方程,可以表示为式(10)、式(11)。
(10)

(11)
两个观测方程对变量(θ, d)的一阶导数组成了Jacobi矩阵
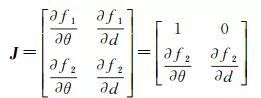
(12)
根据式(8),直角参数空间的光束法平差模型法方程可以表示为
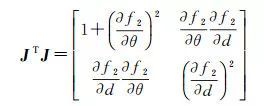
(13)
判断法方程是否奇异,可以通过行列式是否为0来计算。式(13)的行列式等于 的平方
(14)
式中, 可以表示为下式
(15)
式(15)表明,直角坐标系下在两种情况下行列式为零,法方程非正定,光束法平差模型发散。情况一:特征点在相机正前方,即φ→0,此时视差角ω无穷小。情况二:特征点在无穷远位置,即d→∝,此时深度信息非常大,光束法平差方法无法准确预估深度真值,造成光束法平差问题发散。由此,从数学上解释了直角坐标发散的根源。
极坐标系中观测量仍为θ1、θ2,变量为(θ, ω),其最小二乘优化问题可以表示为公式
(16)
其中,f1(θ, ω)和f2(θ, ω)分别表示为
(17)
(18)
两个观测方程对变量(θ, ω)的一阶导数组成了Jacobi矩阵
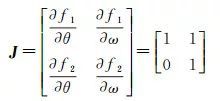
(19)
故其法方程可以表示为
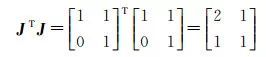
(20)
表明极坐标参数空间下的光束法平差模型在二维场景下的法方程行列式为1,即法方程正定,解算收敛。
综上,极坐标参数空间下法方程相比于直角参数空间的法方程,不受特征点深度长短和视差角大小影响,其法方程为恒正定的,避免了其奇异性风险。
参数变量对观测误差敏感度也影响着解算的收敛性。假设观测变量带有观测噪声
(21)
θ1和θ2为观测真值;θ1Δ和θ2Δ为观测噪声,假设θ1Δ和θ2Δ均满足N(0,σ2)正态分布。在直角坐标系下,假设φ和φ是相机基线到第一个相机观测方向角度的计算值和真值,因此
(22)
根据正弦定理,真实的深度信息可以表示为
(23)
而计算的深度信息为

(24)
因此,深度信息对观测误差θ1Δ、θ2Δ的一阶导数为
(25)
式(25)表明,θ2Δ-θ1Δ≈0,当视差角较小(ω→0)时,深度信息变量对观测误差的一阶导数无穷大,说明原函数在其定义区间不连续,在视差角无穷小的情况下迭代解算没有对应的定值。因此理论上证明,在小视差角的摄影条件下,直角坐标参数空间的深度信息对观测误差极度敏感,在直角系下解算易于发散。
极坐标参数空间的光束法平差模型中(图 2、图 3[20]),真实的视差角可以表示为
(26)
|
| 图 3 极坐标参数空间下的三维特征点参数化Fig. 3Parameterization of three dimensional feature points in polar coordinate parameter space |
同时,计算的视差角表示为
(27)
因此

(28)
式(28)表明在极坐标系下,参数变量对观测误差的一阶导数为定值1,表明原函数在其定义空间中连续,即原图像有解,确保收敛。符号代表视差角逼近0时的方向,无论是右极限还是左极限,迭代均能很好地趋于一个定值,解算收敛。同时,正负值代表了视差角趋零的方向性,加上数值形成矢量域。
综上,直角坐标系的数值没有方向性,本质是标量参考系,是矢量系的一个特例,即没有代表方位方向选择性的数值大小。而极坐标是方向+数值要素,是矢量参考系,可以更为全面地表达地物信息。因此,极坐标系统更为先进、简洁、应用范围更加广泛。
2.2 极坐标光束法平差模型
经典直角坐标系(X, Y, Z)可以非常直接简单地表达三维特征点,但是这种表达方式可能会在一些特殊场景结构下失败。比如,当特征点无穷远或者视差角较小甚至接近于0的情况下,Z很难用具体数字刻画(图 4)。近景摄影测量中,对于高维非线性优化的光束法平差模型,只要存在这样的一个点,就可能会造成优化问题发散。所以经典方法并不是一个适用于所有场合的表示方法。为了从数学上完整表达所有情况下的特征点,本节采用极坐标基准下的角度参数化来表达三维特征点,即F=(φ, θ, ω),如图 3。
|
| 图 4 视差角大小对XYZ表达的影响Fig. 4The effect of parallax angle on the XYZ expression |
当主副锚点选定后,二维特征点坐标和三维视差角参数的变换关系(观测方程)可表示为

(29)
(30)
极坐标光束法平差模型的数学本质为非线性最小二乘优化,优化变量包括所有相机姿态位置和加密点的极坐标参数,即X=[α β γ XS YS ZS ϕ θ ω];优化的观测量为二维图像坐标z=[u v],且图像特征点的权重为Qz-1。在极坐标光束法平差模型中需要估算出最佳的未知参数,使得目标函数(式(31))最小。
(31)
f(X)表示三维点在图像上投影的观测方程,即式(29)。因观测方程为非线性,故该优化问题变成非线性优化问题。
给定所有变量的初值X0,对观测方程进行泰勒级数展开可以得到
(32)
式中, J表示观测值对所有未知数的一阶导数。将式(32)代入式(31),可以得到线性最小二乘优化方程式
(33)
对于式(33)的极值点,其一阶导数必须为0,因此,得到下式
(34)
故未知数的增量可以通过式(35)求解。
(35)
计算得到增量Δ后,新的未知参数可以更新为
(36)
式(33)中,z-f(X0)表示误差方程,半正定矩阵JTQz-1J表示法方程。然后通过非线性最小二乘优化方法求解式(33),得到迭代结果。
3 极坐标下航空遥感影像处理试验
本节通过真实的试验数据验证极坐标光束法平差模型的精度与效率。
3.1 极坐标光束法平差模型收敛性与抗干扰性试验
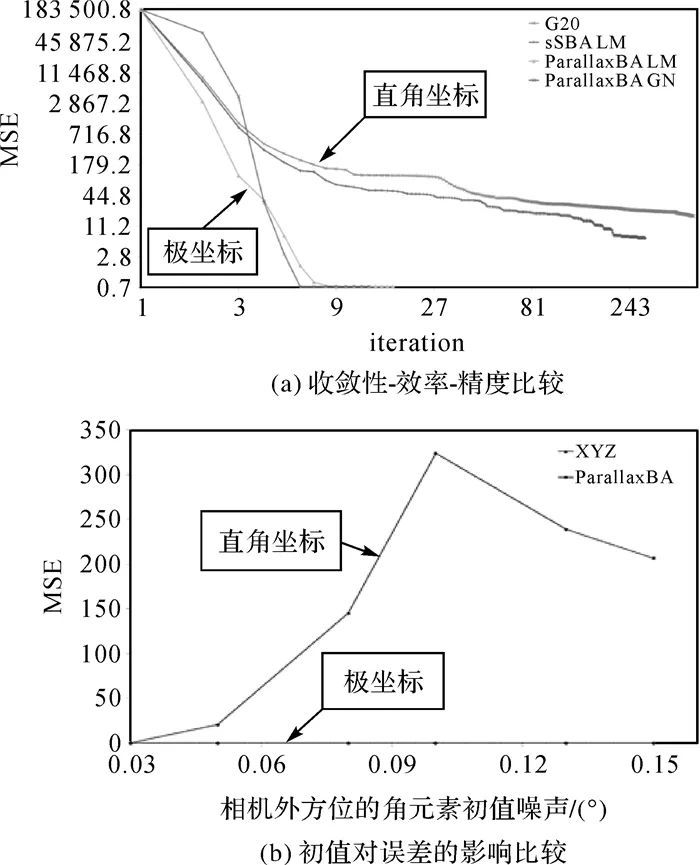
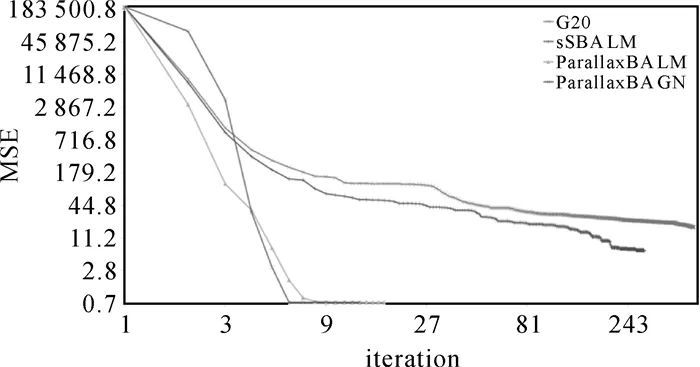
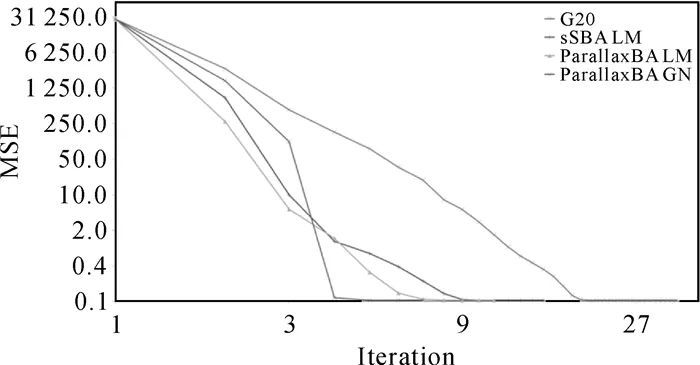
通过采用国内外现有方法开源数据解算试验,如G20, sSBA以及本团队ParallaxBA LM和ParallaxBA GN。此外,又对比了直角坐标系和极坐标系下解算结果对噪声误差的敏感度,所得结果如图 5、图 6所示[4]。
|
| 图 5 不同坐标体系的性能比较Fig. 5Performance comparison between Cartesian and polar coordinate systems |
|
| 图 6 不同坐标体系下收敛性Fig. 6Convergence graph under different coordinate systems |
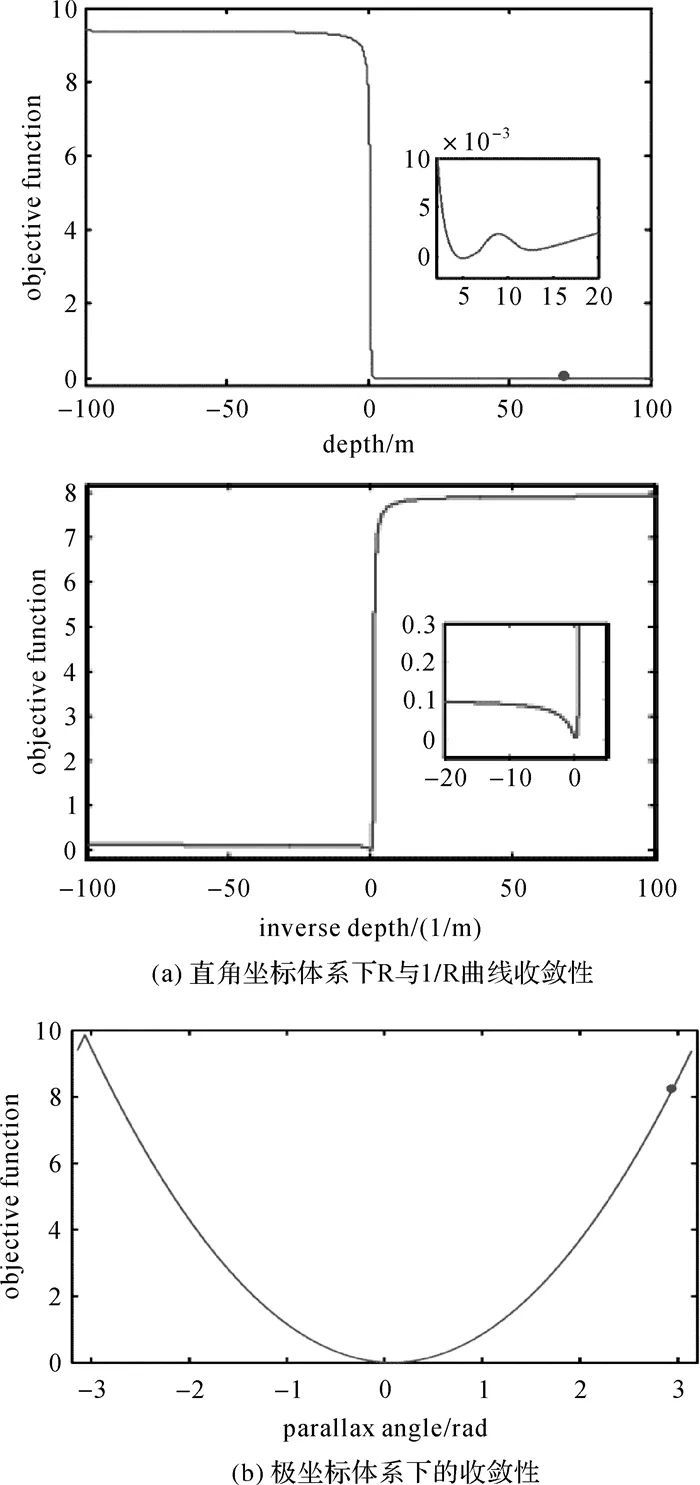
图 5表示极坐标方法与国际现行直角坐标方法,在采用同一数据源时,处理效率可提高2~3个数量级,结果精度可提高1个数量级,且解算结果对误差的敏感度大大降低,即在针对高分辨率遥感影像处理中,基于极坐标系统的方法能够更加快速收敛、保障精度。图 6[5]表示不同坐标体系下的收敛情况,图 6(a)勾画了深度变量从-100 m到+100 m时的目标函数值,结果表明直角坐标系下的光束法平差目标函数呈平谷状,故为找到其极值点,需要较多次数的迭代才能收敛;此外,放大的曲线局部图表明,当初值选在局部极小值右侧时,迭代结果只能取得极小值,无法获得最小值。即使针对微小量采用反向计算即倒数迭代方式,也会出现同样的现象。故直角坐标系下的解算对初始值选取具有很高的依赖性。图 6(b)勾画了在极坐标系下视差角变量从-3.14 rad到+3.14 rad的目标函数值,其目标函数呈二次曲线分布,只需要较少迭代次数便可得到收敛值,无论初始值精度如何,结果精度都能迭代至最小值,即使曲线中间存在极小值,也能够通过函数的“惯性势能”到达最小值,结果准确度提高。因此极坐标系下最优解对初值依赖性小。
抗干扰性表现为对误差的敏感度。式(21)—式(28)表明,当小视差角(ω→0)摄影条件时,直角参数空间下的光束法平差的变量对观测误差有着很强的敏感性,会造成不易收敛或者发散;但对于极坐标参数空间下的光束法平差模型,无论摄影条件如何,变量的误差和观测误差属于同一量级。因此,在极坐标系下光束法平差的抗干扰性可以得到保障。
需要强调的是,上述在极坐标系中处理获得的结果不依赖于地面控制点,从而为实现无地面控制点的高分辨率遥感影像精密处理测量提供了可能。
上述成果体现在团队2011—2015年间所发表的系列文献[4-7, 21-22]中,在OpenSLAM上公布了Parallax BA源代码,经过近3年全球应用和世界上不同用户的不断反馈意见,证明了其可用性。详细解算过程参见代码:http://openslam.org/ParallaxBA.html,欢迎本领域的中国学者支持使用并提出问题,为未来Parallax BA-2源代码发展和世界公布提供帮助。
3.2 航空摄影测量数据验证
本节采用3组航空摄影测量数据,验证极坐标光束法平差模型(ParallaxBA)[14, 19-20]的性能,给定相同的初值,比较最后收敛的MSE、迭代次数和运行效率。所用到的G20和sSBA算法为直角坐标模型,ParallaxBA为本团队极坐标模型。G20和sSBA的软件包在Windows平台上解算效率非常低,但在Linux平台有着最佳效率性能。为了说明极坐标的特点,故在所有试验中只取用直角坐标平差模型最好的结果即在Linux系统中的计算结果,与本文极坐标体系方法ParallaxBA法的Windows和Linux平台的结果一一列出进行比较。此外,G20和sSBA的相机初值为四元数,而ParallaxBA的相机初值为欧拉角,因为四元数和欧拉角之间的转换存在微小的数值误差,故G20、sSBA与ParallaxBA的初值存在细微差别,但可以忽略。G20软件包中选用Gauss-Newton优化进行光束法平差的方法记为G20 GN,G20软件包中选用Levenberg-Marquardt优化进行光束法平差的方法记为G20 LM;类似的对于ParallaxBA,Gauss-Newton和Levenberg- Marquardt优化的光束法平差的方法分别记作ParallaxBA GN和ParallaxBA LM;由于sSBA只有Levenberg-Marquardt优化方法,故sSBA LM等价于sSBA[8]。
3.2.1 Vaihingen数据集
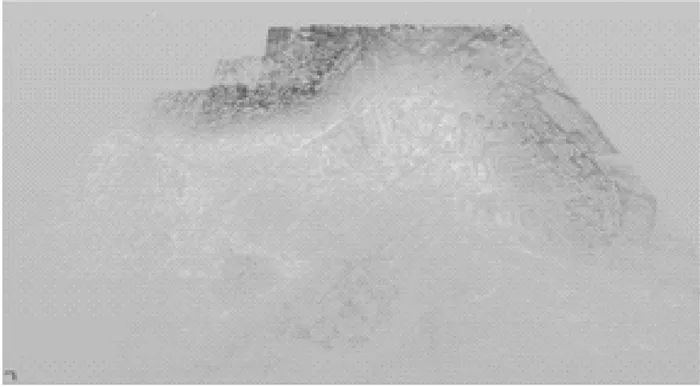
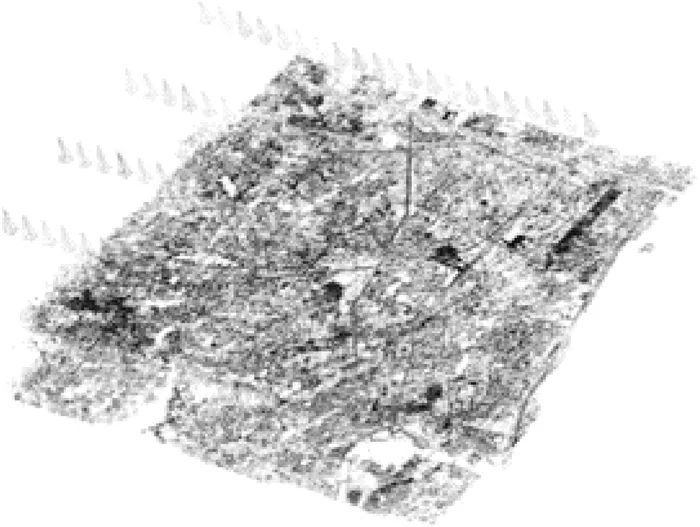
参与平差的数据包括20个相机,554 914个三维特征点,故平差中的未知数为1 664 862、观测方程数为2 409 776。将上述变量和观测量输入到G20、sSBA和ParallaxBA中,在保证有相同的初值(初始MSE)时,收敛精度(收敛MSE)、迭代次数、线性方程数和运行时间见表 1;3种软件包的每次迭代的目标函数曲线见图 7。G20的GN优化的平差因法方程奇异造成平差问题发散,利用LM优化法,需要200次迭代才能收敛到135.06。sSBA、ParallaxBA GN和ParallaxBA LM均可收敛到0.126 012,且迭代次数相近,分别为8、6和20次。时间效率上,ParallaxBA GN和ParallaxBA LM版本平差的效率分别是G20效率的38.7和10倍。而ParallaxBA与sSBA的时间效率相近。平差的最终结果见图 8和图 9。图 8为重建出Vaihingen的三维点和相机姿态,其中三角锥为相机,蓝色点为重建点云。图 9为Vaihingen的三维点,颜色不具有任何实际物理意义。
表 1Vaihingen数据集的G20、sSBA和ParallaxBA收敛性Tab. 1The convergence of G20, sSBA, and ParallaxBA for Vaihingen datasets
| Vaihingen | G20 GN直角坐标 | G20 LM直角坐标 | sSBA直角坐标 | ParallaxBA GN极坐标 | ParallaxBA LM极坐标 | |
| 初始MSE | 144 707.21 | 144 707.21 | 144 707.21 | 144 707.18 | 144 710.18 | |
| 收敛MSE | N/A | 135.060 663 | 0.126 012 | 0.126 012 | 0.126 012 | |
| 迭代次数 | N/A | 200 | 8 | 6 | 20 | |
| 线性方程数 | N/A | 214 | 8 | 6 | 25 | |
| 单次迭代时间 | Win | N/A | N/A | N/A | 1.21 | 1.21 |
| 时间 | Linux | N/A | 1.2 | 0.8 | 1.45 | 1.45 |
| 总时间 | Win | N/A | N/A | N/A | 8.46 | 26.43 |
| Linux | N/A | 263.6 | 6.8 | 8.86 | 35.24 |
|
| 图 7 对于Vaihingen数据,G20,sSBA和ParallaxBA的目标函数曲线变化Fig. 7Changes in the objective function curves for Vaihingen data, G20, sSBA, and ParallaxBA |
|
| 图 8 重建Vaihingen的地形和相机姿态Fig. 8Reconstruction of the terrain and camera posture of Vaihingen |
|
| 图 9 重建Vaihingen的地形Fig. 9Reconstructing the terrain of Vaihingen |
3.2.2 College数据集
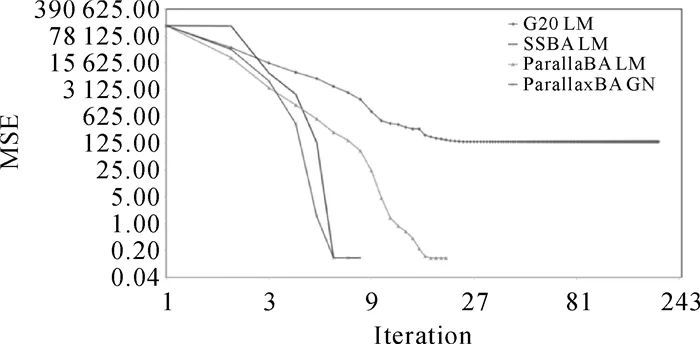
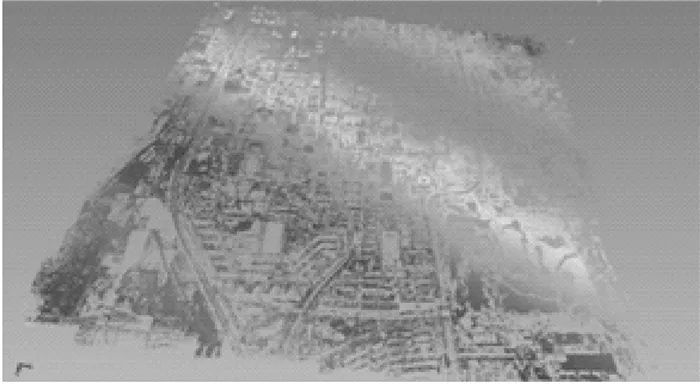
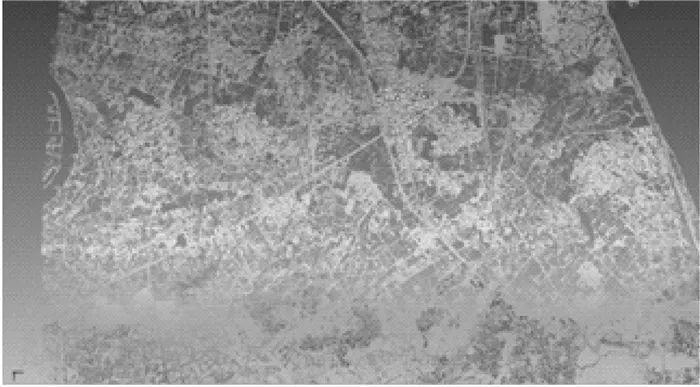
试验采用信息工程大学提供的一组多姿态航摄影像数据进行,参与平差的数据包括468个相机,1 236 502个三维特征点,故平差中的未知数为3 712 314,观测方程数为6 215 048。将上述变量和观测量输入到G20、sSBA和ParallaxBA中,在保证有相同的初值(初始MSE)时,最后的收敛精度(收敛MSE)、迭代次数、线性方程数和运行时间见表 2;另外三种软件包的每次迭代的目标函数曲线见图 10。G20的GN优化的平差因法方程奇异造成平差问题发散,利用LM优化法,需要200次迭代才能收敛到25.723 307;sSBA需要200次迭代才能收敛到9.272 481。ParallaxBA只需要12次或17次迭代便可收敛到更小的值,即0.734 738。时间效率上,ParallaxBA GN版本平差的效率分别是G20和sSBA效率的18倍和12倍;ParallaxBA LM版本平差的效率分别是G20和sSBA效率的12和9倍。平差的最终结果见图 11、图 12。图 11为重建出College的三维点和相机姿态,其中三角锥为相机,深色点为重建点云。图 12为College的三维点,颜色不具有任何实际物理意义。
表 2College数据集的G20、sSBA和ParallaxBA收敛性Tab. 2The convergence of G20, sSBA, and ParallaxBA for College data sets
| College | G20 GN直角坐标 | G20 LM直角坐标 | sSBA直角坐标 | ParallaxBA GN极坐标 | ParallaxBA LM极坐标 | |
| 初始MSE | 202 329.64 | 202 329.64 | 202 329.64 | 202 329.44 | 202 329.44 | |
| 收敛MSE | N/A | 25.723 307 | 9.272 481 | 0.734 738 | 0.734 738 | |
| 迭代次数 | N/A | 200 | 200 | 12 | 17 | |
| 线性方程数 | N/A | 349 | 228 | 12 | 17 | |
| 单次迭代 | Win | N/A | N/A | N/A | 2.71 | 2.71 |
| 时间 | Linux | N/A | 2.51 | 2.72 | 3.85 | 3.85 |
| 总时间 | Win | N/A | N/A | N/A | 37.14 | 49.68 |
| Linux | N/A | 674.83 | 453.22 | 51.55 | 69.58 |
|
| 图 10 对于College数据,G20,sSBA和ParallaxBA的目标函数曲线变化Fig. 10Changes in the objective function curves for College data, G20, sSBA, and ParallaxBA |
|
| 图 11 重建College的地形和相机姿态Fig. 11Reconstruction of the terrain and camera posture of College |

|
| 图 12 重建College的地形Fig. 12Reconstructing the terrain of College |
3.2.3 Village数据集
试验采用国家航空遥感数据获取与服务技术创新联盟第一届理事长单位北京星天地信息科技有限公司的数据。以长期生产作业挑选的航飞数据,检验视差角极坐标新方法;且平差过程中没有使用任何地面控制点,以检验无地面控制点时平差的精度和效率。
参与平差的数据包括90个相机、305 719个三维特征点,故平差中的未知数为917 697,观测方程数为1 558 536。将上述变量和观测量输入到G20、sSBA和ParallaxBA中,在保证有相同的初值(初始MSE)时,收敛精度(收敛MSE)、迭代次数、线性方程数和运行时间见表 3;另外3种软件包的每次迭代的目标函数曲线见图 13。G20的GN优化的平差因法方程奇异造成平差问题发散,利用LM优化法,需要34次迭代才能收敛到0.083 716。sSBA和ParallaxBA均可收敛到0.083 716,且迭代次数相近,时间效率相近,分别为8、6和11次。时间效率上,ParallaxBA GN和ParallaxBA LM版本平差的效率分别是G20效率的5.2和3.7倍。平差的最终结果见图 14和图 15。图 14为重建出Village的三维点和相机姿态,其中三角锥为相机,深色点为重建点云。图 15为Village的三维点,颜色不具有任何实际物理意义。
表 3Village数据集的G20、sSBA和ParallaxBA收敛性Tab. 3The convergence of G20, sSBA, and ParallaxBA for Village data sets
| Village | G20 GN直角坐标 | G20 LM直角坐标 | sSBA直角坐标 | ParallaxBA GN极坐标 | ParallaxBA LM极坐标 | |
| 有无地面控制点 | 有 | 有 | 有 | 无 | 无 | |
| 初始MSE | 28 174.10 | 28 174.10 | 28 968.73 | 28 170.98 | 28 170.98 | |
| 收敛MSE | N/A | 0.083 716 | 0.083 716 | 0.083 716 | 0.083 716 | |
| 迭代次数 | N/A | 34 | 8 | 6 | 11 | |
| 线性方程数 | N/A | 55 | 8 | 6 | 11 | |
| 单次迭代 | Win | N/A | N/A | N/A | 0.67 | 0.67 |
| 时间 | Linux | N/A | 0.62 | 0.56 | 0.96 | 0.96 |
| 总时间 | Win | N/A | N/A | N/A | 5.07 | 7.92 |
| Linux | N/A | 27.46 | 4.54 | 6.98 | 12.23 |
|
| 图 13 对于Village数据,G20,sSBA和ParallaxBA的目标函数曲线变化Fig. 13Changes in the objective function curves for Village data, G20, sSBA, and ParallaxBA |
|
| 图 14 重建Village的地形和相机姿态Fig. 14Reconstruction of the terrain and camera posture of Village |
|
| 图 15 重建Village的地形Fig. 15Reconstructing the terrain of Village |
通过分析发现:①极坐标系光束法平差模型处理常规情况下的航空遥感影像时,在精度、效率上比直角坐标方法有数量级提高,且在不同平台下都能较好的收敛,无发散现象;②对于直角坐标系平差模型,采用了其效果较好的情况(如Linux平台),而将极坐标系光束法平差的Linux和Windows平台下的结果一一列出,说明极坐标系光束法平差模型对操作系统依赖性低,具有较好的可移植性,而直角坐标方法对平台差异较为敏感;③试验中采用的直角坐标方法是现有的成熟开源软件,而极坐标平差模型是初期的编译代码,软件的成熟程度对处理结果的质量也存在较大影响,若将此方法完善成为成熟软件,则在精度和效率上再提高数倍或一个量级是有可能的。
试验(3)采用了在实际生产作业中直角坐标体系方法无法实现拼接的航摄影像,在无地面控制点参与平差的情况下利用极坐标方法实现了影像特征提取和拼接,为实现基于极坐标的去地面控制点影像解算的产业化应用奠定基础;此方法也适应于大量航空影像数据的处理。因此极坐标自由网光束法平差模型既可以处理常规场景数据(稳定的飞行姿态及简单的几何摄影结构),也可以高稳健性处理复杂摄影场景数据(如近景拍摄影像、无人机航摄、多姿态飞行摄影等)。
4 极坐标系统绝对定向
如何在现有自由网平差模型的基础上实现极坐标绝对网光束法平差,是实现极坐标摄影测量理论体系完善的重要任务之一。由于绝对网平差引入的地面控制点和极坐标表达的加密点分别在两个坐标系下,因此直角坐标系下的绝对网平差模型不能直接应用于极坐标平差模型。由此给出一种基于相似变换约束的极坐标绝对网平差优化模型,建立极坐标系中加密点坐标和直角坐标系中控制点参数化联系。
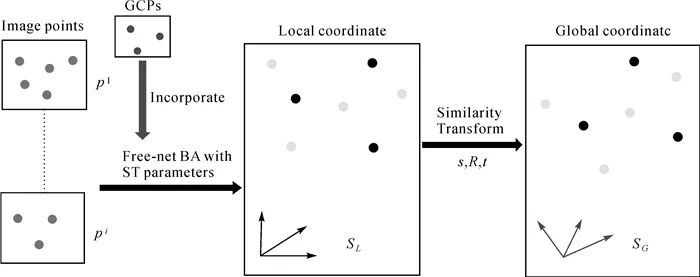
极坐标绝对网平差模型主要通过相似变换约束条件,以实现欧氏空间表征的控制点统一到角度表征的极坐标自由网中,从而实现图像误差在自由网优化中得到有效控制点,为后续相似变换提供刚体变换前提条件。其主要流程可以分为两步(图 16)。
|
| 图 16 模型主要包含步骤Fig. 16The main steps of the model |
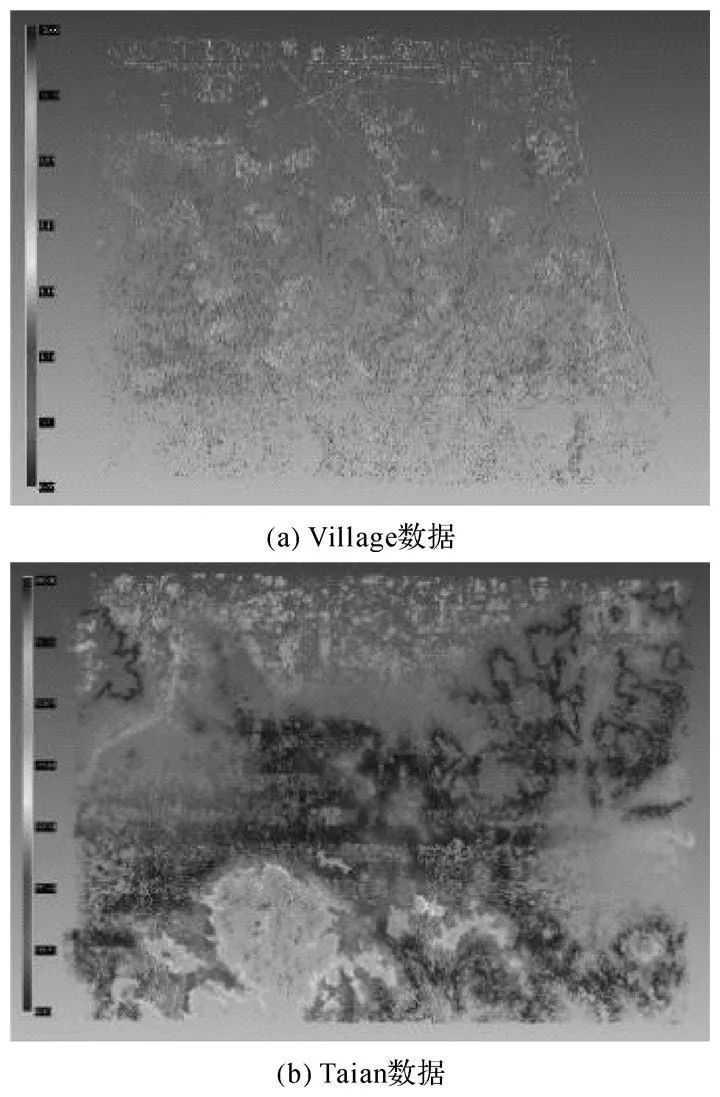
本节通过两套不同尺度真实航空数据来验证极坐标绝对网平差模型对真实数据适应性。第一套数据(Village数据集)为丘陵数据,包含90张DMC影像,有4条航带,其图像几何分辨率为0.1 m;第二套数据(Taian数据集)为高山数据,包含737张DMC影像,几何分辨率为0.5 m。2套数据具体参数见表 4。
表 4真实航空数据集参数Tab. 4Real aero dataset parameters
| 参数 | Village数据 | Taian数据 |
| 影像数 | 90 | 737 |
| 航带数 | 4 | 12 |
| 地形 | 丘陵 | 高山 |
| 比例尺 | 1:1000 | 1:5000 |
| 测区大小 | 2 km×3.5 km | 53 km×35 km |
| 相机 | DMC | DMC |
| 像幅 | 7680×13 824 | 7680×13 824 |
| 分辨率/m | 0.1 | 0.5 |
| 控制点 | 6 | 32 |
| 检查点 | 6 | 20 |
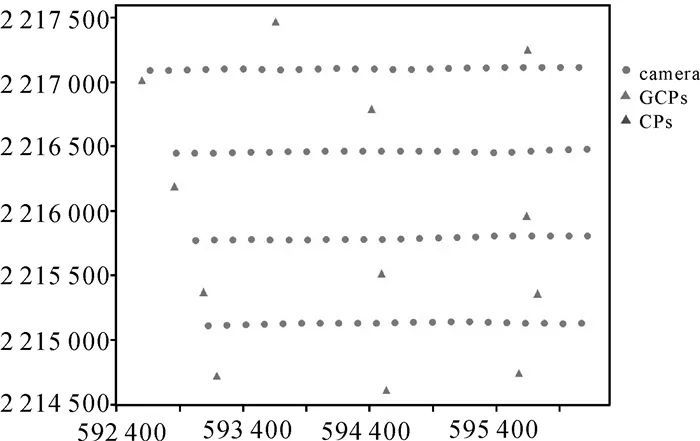
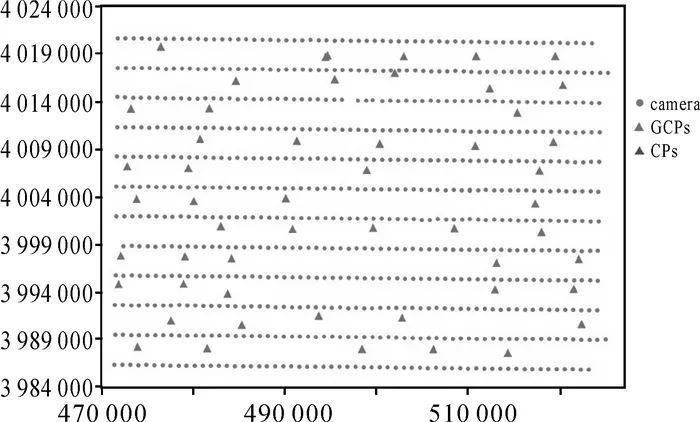
本文利用L2-SIFT算法[21, 23]从大像幅航空影像中提取并匹配高精度连接点,得到的特征像点将作为平差模型的第一类观测量。2套数据中相机、控制点和检查点在平面方向空间分布情况见图 17、图 18。
|
| 图 17 Village数据分布Fig. 17Village data distribution |
|
| 图 18 Taian数据分布Fig. 18Taian data distribution |
算法运行在i5-3210M@2.8 GHz CPU笔记本上,其运行时间及平差包含参数变量见表 5。
表 5平差参数及运行效率Tab. 5Adjustment parameters and operating efficiency
| 参数 | Village | Taian |
| 加密点 | 305 719 | 2 743 625 |
| 图像点 | 779 320 | 6 017 028 |
| 初始误差 | 56 432.16 | 590 764.93 |
| 收敛误差 | 0.090 13 | 0.138 706 |
| 迭代次数 | 11 | 18 |
| 总时间/s | 11.2 | 126.4 |
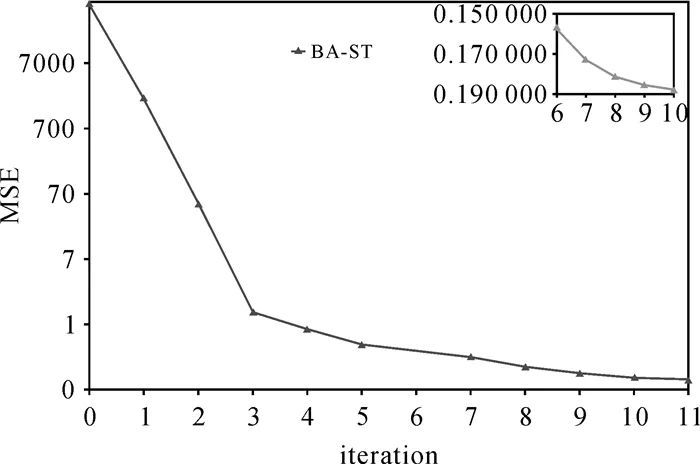
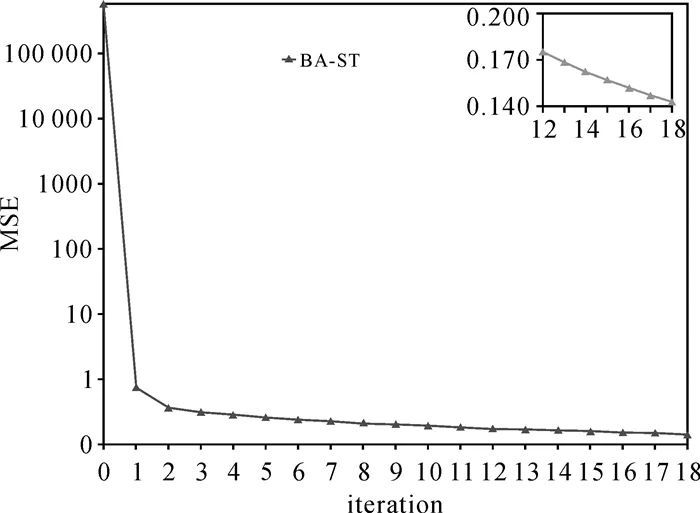
表 5表明,第1套数据经过11次迭代,在初值误差函数为56 432的前提下,可以快速收敛到0.090 13(图 19)。第2套数据,目标函数经过18次迭代可以从590 764.93收敛到0.138 706(图 20)。
|
| 图 19 第一套Village数据目标函数收敛过程Fig. 19The first set of Village data objective function convergence process diagram |
|
| 图 20 第2套Taian数据目标函数收敛过程Fig. 20Second sets of Taian data objective function convergent process diagram |
试验结果见表 6,经过极坐标绝对网平差估算出的加密点见图 21。对于第1套数据,将6个控制点引入到极坐标绝对网平差模型中,利用6个检查点来评价模型精度。平面和高程精度分别为0.16 m和0.21 m,满足国标GBT 23236—2009规定的1:1000比例尺丘陵地形空三测量平面和高程精度均小于0.35 m要求(GBT 23236—2009,2009)。对于第2套数据,将32个控制点引入平差模型,利用20个检查点来评价模型精度。其得到平面和高程精度分别为0.57 m和1.83 m,满足国标GBT 23236—2009规定的1:5000比例尺高山地形空三测量平面和高程精度均小于2.5 m要求(GBT 23236—2009,2009)。
表 6Village和Taian数据集试验结果Tab. 6Experimental results of Village and Taian datasets
| 参数 | Village | Taian | |
| 最大误差/m | 东向 | 0.117 8 | 0.638 7 |
| 北向 | 0.258 6 | 1.272 8 | |
| 平面 | 0.235 2 | 1.042 5 | |
| 高程 | 0.316 1 | 3.508 7 | |
| RMSE | 东向 | 0.069 0 | 0.307 3 |
| 北向 | 0.150 2 | 0.480 2 | |
| 平面 | 0.165 3 | 0.570 2 | |
| 高程 | 0.219 4 | 1.834 8 |
|
| 图 21 极坐标绝对网平差模型重建出海量加密点Fig. 21Reconstruction of massive encrypted points by polar coordinate absolute network adjustment model |
因此,极坐标体系下的绝对网光束法平差仍然能解算出高精度的加密点坐标。
5 极坐标体系方法的应用特点5.1 航天对地观测的极坐标应用必要性
近景摄影测量通常采用两个相对静止、相距一定距离的相机对地面目标进行成像(图 22),利用立体像对对目标物进行观测,以得到其位置,形状等特征。航空摄影常将2个相机置于同一平台,这种作业模式可以保证2台相机无相对位移,不需要考虑航空平台行进的速度及加速度,此时仅存在位置(静态)误差,解算过程中也无需引入动态参量。
|
| 图 22 近景摄影测量Fig. 22Close range photogrammetry |
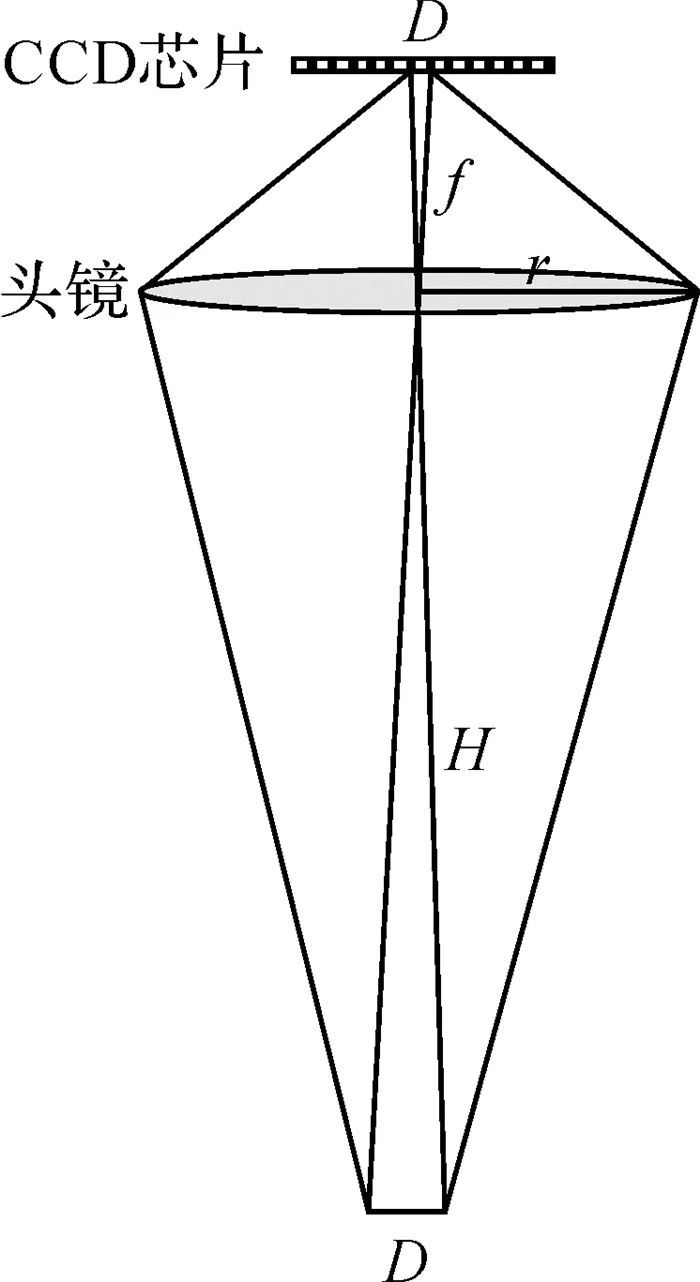
航空成像多采用面阵成像(图 23),本质为扇形-锥体成像,适应于极坐标表达,但目前主要是直角坐标表达。根据航空针孔成像模型下CCD像素与成像区域之间的对应关系(图 24)可知,随着焦距f增大,获取影像的分辨率会逐渐增高,即H高度矢径保持不变,焦距f增大,极角减小,影像分辨率增高。因此,极坐标系统的引入是必要的,它可以使航空获取-处理高分辨率影像更加高效便捷。航天成像多使用线阵推扫方式,获得的弧长目前主要用矢径乘以极角来表示;这样可以允许其视差角非常小时并不影响精度。若如此,航天线阵推扫和航空面阵成像处理,有望实现统一的极坐标数学表达。
|
| 图 23 航空面阵成像Fig. 23Aerial array imaging |

|
| 图 24 CCD像素与成像区域关系Fig. 24Relationship between CCD pixels and imaging region |
在航天摄影测量中,由于传感器距离目标较远,需要保证在摄影时有较大的视差角,避免由于视差角过小引入偏差。为避免直角坐标系下航天同一平台2台相机对地成像引起的小角度、短基线问题(式(1)),采用两种对地观测模式:模式一,同一平台2台相机不同时刻对地观测;模式二,两个平台相同时刻以一定角度对地成像。
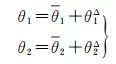
实际上,航天平台不同时刻存在不同飞行状态,经典的处理过程中只考虑静态参量,导致解算的结果是不精确的,常只从处理模型及静态位置参量考虑误差来源,这时就不能称之为高分辨率下的高精度处理。实际情况需要考虑两个运动卫星位置(X, Y, Z)、姿态(俯仰、摇摆、滚动)6个自由度、位置及姿态的一阶导数、二阶导数和3个位置残差,形成高分辨率遥感影像21阶方程如下
(37)
航天设备如飞船就是这样解算动态载体参数的,其实时解算非常不易。但如果对影像考虑上述21阶参量影响并解算,其计算量成数量级上升,目前条件下几乎不能实现。因此,目前航天影像只是考虑静态参量加入处理解算,但高分辨率所需要的精度在动态参量未参与计算时根本无法体现,成为一个新的较大误差源。例如,卫星振颤的消除[24],本质上是扰动力F产生的加速度a的作用
(38)
这里m是卫星平台质量。加上速度变量v的贡献,得到位移与v和a的作用
(39)
这里S-S0是成像时间t的位移增量。显然,卫星振颤产生的加速度误差是时间增量t的平方,如果不予考虑是不可能获得动态误差剔除后的高精度解算的。
进一步针对高分辨率航天影像处理,如果只考虑静态参量的解算,对于高精度参量的保障是相对困难的,也是有悖运动方程解算机理的。因此在考虑现有方法解算时,如果速度平稳,其21阶方程的6阶速度分量可以近似为常数,但与扰动振动相关的加速度分量是无法忽略也是动态误差的最大根源。
为了既保障高精度,又不引入动态变量来解算图像,唯一保障的就是两个相机没有相对位移,即同一航天平台装载两个相机实现同步观测。然而,在同一平台上必然出现视差角过小的现象,使用直角坐标系统已不能准确刻画影像信息甚至发散,而极坐标表示方法可以表达出小视差角、短基线下的影像细节信息,使解算过程变得更加便捷有效。这将是一个新课题。
要说明的是,现在航天影像处理所采用的有理多项式函数通用模型,其阶次数是对静态非线性描述,一般不高于3次,多项式的一次项的比值用来描述投影误差,二次项的比值用来描述地球曲率误差、大气折光差、镜头畸变差等;更高次项的比值用来描述其他一些未知的具有高阶分量的误差,但都不适宜对动态误差直接刻画。
因此,引入极坐标是较接近解决上述问题的方法:采用同一平台、相同时刻、2台相机对地观测,可以不考虑直角坐标系下小角度、短基线引发的奇异阵、非收敛性问题;同时避免由于航天单载荷平台在不同时刻或不同平台同一时刻观测,存在不同飞行状态所引发的高分辨率影像21阶方程解算困难,甚至不可解算的问题。
航空航天处理的极坐标应用具有巨大优越性。将极坐标体系实现硬件化装机到多类传感器上,可以有望实现星上实时解算、实时传输,由传感器平台引发的处理问题可以在线处理。
5.2 航空航天处理的极坐标应用
将极坐标高分辨率观测方法扩展应用于海洋海事领域[25],本文合作团队把极坐标方法引至多角度海洋海事目标探测识别, 见图 25和表 7,可以解决拼接速度慢、对误差高敏感度等问题;在极坐标系统下可以很好地处理大角度、变姿态问题(图 15)。总之,虽然在简单摄影条件情况(例:载人航空摄影),与直角坐标性能相当,但是在其他复杂摄影条件(例:无人机摄影及高重叠近景摄影),其优势显著,见表 8。
|
| 图 25 海洋遥感影像精准拼接Fig. 25Accurate mosaic of ocean remote sensing |
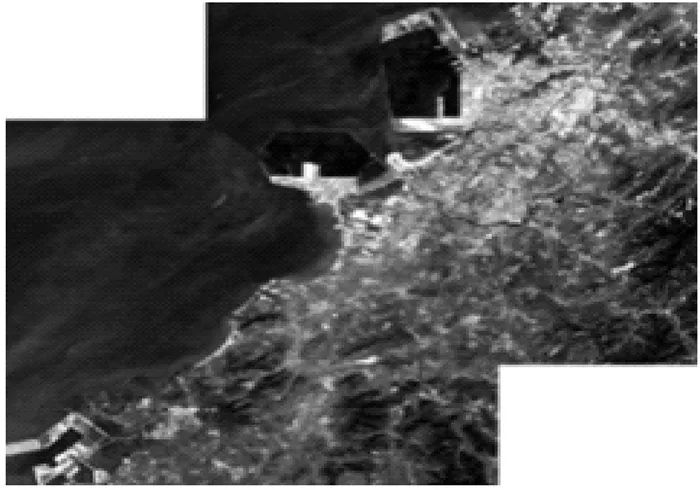
表 7原有方法与引入极坐标法比较Tab. 7The comparison table between the original method and the introduction of polar coordinate method
| 比较要素 | 海洋海事 | ||
| 定量化特点 | 数据有效性 | 目标识别 | |
| 原有方法 | 相对弱 | 一般 | 弱 |
| 引入极坐标法 | 无人艇监测定标 | 极坐标变角度,好 | 识别度高 |
表 8直角坐标、极坐标特点对比Tab. 8Comparison of the characteristics of Cartesian and polar coordinates
| 比较要素 | 满足直角坐标约束的规范影像 | 对高重叠影像 | 影像精度-效率-抗干扰性 | 大角度 | 变姿态 | 航空面阵航天线阵 | 与国军标数据组织存储比较 |
| 现有方法直角坐标 | 可处理 | 易产生奇异性,有时发散 | 可以 | 相对困难 | 相对困难 | 坐标不同 | 需直角-弧度转换 |
| 极坐标 | 可处理 | 极大去除奇异性根源,无发散 | 可数量级提高 | 方便处理 | 方便处理 | 可统一坐标 | 无需转换 |
其二,极坐标在GeoSOT剖分经纬格网也有重要的应用意义,它着眼于地球空间信息“取自经纬,归于经纬”和椎体成像的本质特征,采用极坐标系作为空间信息链条中间阶段的数据组织、管理和存储基准,为建立新型空间信息表达结构提供了新的途径。
其三,SAR图像方位向表达,LiDAR点云初始表达,都与极坐标直接相关或源自极坐标。由此,可以探索空间信息多种成像方式的统一坐标系表达,或可成为空间信息基础研究的重要探索方向。
6 结论
(1) 高分辨率遥感数据处理效率低甚至发散的根源是影像处理的病态性。为此引入极坐标体系,其本质是将直角坐标同量纲几何参量转换为角度和矢径量纲,从根源上避免了病态奇异性引发的发散问题,实现高维非线性优化问题快速收敛和三维测量。
(2) 本文历经10余年初步建立了一套空间信息极坐标基准的数学模型,完善了极坐标方法体系。根据最复杂的近景摄影测量和自由网平差试验,证明了极坐标的引入使效率、精度、收敛性、抗干扰性有数量级提高。团队在参考文献[4-7, 21-22]发表过程中公布的Parallax BA源代码,经过近3年全球应用,证明了其可用性。期待本领域尤其是中国团队的广泛试用,并对本团队上述6篇文献进行批评帮助。
(3) 部分航空摄影测量和绝对网平差模型试验,初步证明了极坐标方法比直角坐标处理方法为优。对应有本团队在参考文献[8, 16, 20, 23]的详细阐述,期待批评并斧正。现正在与武汉大学等航空摄影测量团队实化软件,为在国际上推出极坐标Parallax BA-2而努力。
(4) 极坐标处理方法有利于解决变姿态影像获取及拼接问题;为航天线阵推扫和航空面阵成像的统一数学表达提供可能;并有利于传感平台引发的处理问题在线解决,为影像无地面控制点定位、大倾角或短基线观测、变焦、摆扫成像等新技术提供新手段。
(5) 将极坐标体系引入航天领域,有望实现同一平台、相同时刻、两台相机对地成像。由此可以避免直角坐标系下航天观测引发的小角度、短基线,以及高分辨率影像21阶动态方程解算方可保障精度,甚至不可解算的困难。
(6) 极坐标方法的有效获取、处理与GeoSOT剖分经纬网格结合,可望为新一代空间信息体系的源端和终端,以形成多尺度全姿态空间信息获取-组织-管理-存储-处理-应用的极坐标体系奠定基础。
(7) 如何在近景摄影测量和常规状态下充分使用普遍存在的直角坐标系软件、处理模型,发挥其工业化水平高而成熟的优势;又在航空航天新技术丰富发展需求下全面转换、努力展现极坐标体系的优势,是今后需要把握当今、迎接未来的实践过程。但空间信息逐步实现从获取到应用全部过程的极坐标基准方法,是笔者的目标,也是未来智能摄影测量无人工干预情况下自组织、自协调的数学基础。
致谢:感谢国家基金委、科技部的长期支持。感谢本团队赵亮等毕业学生的创造性贡献,感谢悉尼科技大学Shoudong HUANG、Dissanayake G,美国普渡大学Jie SHAN及童庆禧、刘先林、杨元喜、周成虎、张祖勋、龚健雅、袁修孝、宋妍对本研究提供的帮助。
【引文格式】晏磊, 陈瑞, 孙岩标. 极坐标数字摄影测量理论与空间信息坐标体系初探[J]. 测绘学报,2018,47(6):705-721. DOI: 10.11947/j.AGCS.2018.20170636
精
彩
回
顾
知识| 地图与儒家经典
学术前沿| 李必军教授:高精还是高精度?自动驾驶地图的发展之路
地心坐标系是以地球质心作为坐标原点的坐标系。地心坐标系又可分为地心空间大地直角坐标系和地心大地坐标系。
大地测量坐标系地心空间大地直角坐标系
地心空间大地直角坐标系可分为地心空间大地平直角坐标系和地心空间瞬时直角坐标系。其最明显的特征是坐标系的原点位于地球的质心。
大地测量坐标系地心大地坐标系
地心大地坐标系与某一地球椭球元素有关,一般要求是一个和全球大地水准面最为密合的椭球。全球密合椭球的中心一般可认为与地球的质心重合。所以,地心大地坐标系的一个明显特征是该坐标系所对应的与地球最密合的椭球的中心位于地球质心,其短轴一般指向国际协议原点(CIO)。
三坐标测量在同轴度检测是我们在测量工作中经常遇到的问题,用三坐标进行同轴度的检测不仅直观且又方便,三次元、2.5次元与三坐标其测量结果精度高,并且重复性好 。
三坐标测量机的功能是快速准确地评价尺寸数据,为操作者提供关于生产过程状况的有用信息,这与所有的手动测量设备有很大的区别。将被测物体置于三坐标测量空间,可获得被测物体上各测点的坐标位置,根据这些点的空间坐标值,经计算求出被测物体的几何尺寸、形状和位置。
超高层钢结构复杂空间坐标测量定位工法相关推荐
- 相关百科
- 相关知识
- 相关专栏
- 超高建筑
- 超高建筑强/台风作用及其效应的现场实测与理论分析
- 超高强度硼钢板热冲压成形技术
- 超高性能纤维-水泥基复合材料的制备及其界面效应
- 超高效时间管理:用12周完成12月的工作
- 超高混凝土重力坝坝基岩体质量及利用标准研究
- 超高温合金
- 超高温陶瓷材料制备方法及其强度计算
- 超高灵敏度光致形变微梁- - 纳米膜气敏传感器的研究
- 超高真空充排气台
- 超高纯气体输送与监控系统
- 超高车辆撞击桥梁上部结构研究:破坏机理、设计方法和防护对策
- 超高速光学相干层析成像的光计算方法的探索
- 超高速切削技术
- 超高速碰撞下材料的破碎机理与防护设计
- 超高面板堆石坝面板结构破损发生机制和模拟方法
- 摄影测量实验课程项目化教学改革
- 杂散电容对交流法微电容测量电路噪声特性影响的分析
- 中博会展中心C1区钢结构屋面大型主桁架的施工技术
- 因工程施工、设备维修等原因确需停止供水审批申请表
- 中国水利水电第十六工程局有限公司机场施工发展战略
- 张峰水库2号倒虹预应力钢筒混凝土管道安装施工工艺
- 指路标志(分流、合流诱导标)施工记录
- 中广核贵州龙里风电场升压站建筑物装饰装修施工方案
- 引绰济辽工程远距离输水隧洞TBM施工三维数值模拟
- 园林景观及配套设施标工程施工组织设计建筑施工
- 再谈VRV空调系统设计与施工中有关问题的解决方法
- 昭待高速公路路面预防性养护工程施工总结-推荐下载
- 整体平移后六层砖混结构住宅楼整体提升的施工与监测
- 中国铁道建筑总公司地下空间安全管理知识培训
- 医院综合楼基坑排桩支护及支撑体系土方开挖施工方案
- 引进10000m^3/h空分设备的流程及安装特点
最新词条
安徽省政采项目管理咨询有限公司
数字景枫科技发展(南京)有限公司
怀化市人民政府电子政务管理办公室
河北省高速公路京德临时筹建处
中石化华东石油工程有限公司工程技术分公司
手持无线POS机
广东合正采购招标有限公司
上海城建信息科技有限公司
甘肃鑫禾国际招标有限公司
烧结金属材料
齿轮计量泵
广州采阳招标代理有限公司河源分公司
高铝碳化硅砖
博洛尼智能科技(青岛)有限公司
烧结刚玉砖
深圳市东海国际招标有限公司
搭建香蕉育苗大棚
SF计量单位
福建省中亿通招标咨询有限公司
泛海三江
威海鼠尾草
Excel 数据处理与分析应用大全
广东国咨招标有限公司
甘肃中泰博瑞工程项目管理咨询有限公司
山东创盈项目管理有限公司
拆边机
当代建筑大师
广西北缆电缆有限公司
大山槟榔
上海地铁维护保障有限公司通号分公司
舌花雏菊
甘肃中维国际招标有限公司
华润燃气(上海)有限公司
湖北鑫宇阳光工程咨询有限公司
GB8163标准无缝钢管
中国石油炼化工程建设项目部
韶关市优采招标代理有限公司
莎草目
建设部关于开展城市规划动态监测工作的通知
电梯平层准确度
广州利好来电气有限公司
四川中泽盛世招标代理有限公司