



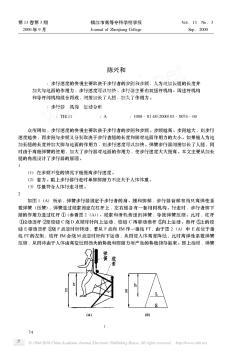


分析了步行运动的状态,确定了双足步行机器人自由度的分配,在比较各种驱动装置优缺点的基础上,选择了精度高、维修简单且易于程序控制和集中控制的舵机作为驱动器。根据特定的结构特征,构建了双足步行机器人的基本框架,并利用三维建模软件Unigraphics建立了双足步行机器人的实体模型。
热门知识
水上步行器精华知识
水上步行器-
话题: 工程造价shicostars
-
话题: 路桥市政zhongjixian
-
话题: 路桥市政xiaoanycall
最新知识
水上步行器-
话题: 路桥市政lfiueng7809
水上步行器相关专题
- 邻水上甲华庭多少钱一平米
- 一般的水上乐园设备多少钱
- 建造水上木屋价格是多少
- 给水上冲洗栓套什么定额
- 给水上管件如何计取
- 温州水上乐园团票价多少
- 风水上玻璃推拉门算门吗
- 水上滑滑梯一般价格多少
- 水上乐园一般价格多少
- 水上打钢管柱
- STC150系列混凝土搅拌船在水上基础施工工程中的应用
- 国家安全生产监督管理局要求加强水上和道路交通安全
- 水上钻孔桩施工专项方案
- 上海青草沙水库及取输水泵闸工程水上混合软体排施工实例
- 水上游乐设施通用技术条件GBT-18168-2018
- 水上乐园施工组织设计
- 东港镇山联村水上游览线路园林景观工程新增红叶石楠
- 水上施工组织设计
- 水上交通安全专项整治工作方案
- 中国水上消防协会第六次会员代表大会
- 洪湾涌大桥水上平台方案及力学验算
- 中国水上消防协会天津联络处年度工作会议
- 桥梁工程中水上钢平台与钢便桥的设计与施工技术
- 桥梁复杂水文条件下水上基础施工技术
- 榕江南河大桥水上大体积盖梁托架法施工技术
- 水上高密度地震映像法勘探在水利工程中应用
- 水上无覆盖层钻孔灌注桩施工技术与实践