




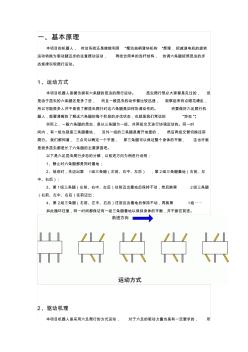
一、基本原理 本项目的机器人, 传动系统还是继续利用 “摆动曲柄滑块机构 ”原理,把减速电机的旋转 运动转换为驱动腿迈步的往复摆动运动, 再结合简单的连杆结构, 协调六条腿按照昆虫的步 态规律实现爬行运动。 1、运动方式 本项目机器人是模仿拥有六条腿的昆虫的爬行运动。 昆虫爬行想必大家都是见过的, 但 是由于昆虫的六条腿还是多了些, 而且一般昆虫的动作都比较迅速, 观察起来有点眼花缭乱, 所以可能很多人并不是很了解昆虫爬行时这六条腿是如何协调动作的。 而要做好六足爬行机 器人,就要清晰的了解这六条腿的每个阶段的步伐状态,也就是我们常说的 “步态”。 实际上,一般六条腿的昆虫,是以三条腿为一组、共两组交叉进行协调运动的。同一时 间内,有一组也就是三条腿着地, 另外一组的三条腿是离开地面的, 然后两组交替切换往前 爬行。我们都知道, 三点可以确定一个平面, 即三条腿可以保证整个身体的平衡, 这
机器贴标机械相关专题
- 焊电路板的机器是什么焊机
- 机器没法接地怎么防静电
- 发电焊机一体机是什么机器
- 电动的开卷机器怎么工作
- 如何去除机器设备的静电
- 如何消除机器设备的静电
- 大型做被机器是用几项电
- 避雷针除锈用什么机器快
- 机器人云台
- 家庭机器人
- 中国机械工程学会授予材料热处理工程师资格人员名单
- 以杉木积成材为芯板的新型细木工板的动态热机械分析
- 以浙江省公路养护机械化的发展看筑养路机械市场需求
- 制定机械加工劳动定额切削用量时间标准若干问题
- 中国国际城市市政工程机械建筑机械及施工车辆展览会
- 中国农业机械学会
- 在线期刊——制冷空调与电力机械竞争的新着力点
- 中国林业机械协会关于向社会推荐木工机械产品的通知
- 以项目为导向实施机械测量技术课程教学改革
- 中国农业机械流通协会第三次会员代表大会
- 执勤防御(护)性器械和报警、通讯设备使用管理规定
- 医疗器械生产质量管理规范现场检查指导原则—摸底用
- 中国机械工程学会铸造学会
- 医疗器械操作规程
- 中国工程机械工业协会工业车辆分会理事会
- 中国工程机械学会工程起重机械分会
- 能跨越水平窗框障碍的玻璃幕墙清洗机器人的设计