

关于白车身装焊夹具的设计及点焊机器人的焊接仿真分析
格式:pdf
大小:1.5MB
页数:2P
人气 :76
 4.7
4.7
整车产品想要实现质量和生产效率的稳步提升,离不开白车身焊接技术的帮助,其对于整车质量有着至关重要的影响作用,同时对整车产品设计及其行驶安全等也同样起到了直接的正向影响.在此背景下,本文将从简单介绍白车身及焊装夹具入手,以左前纵梁轮罩分总成为例,简要分析研究白车身装焊夹具的设计及点焊机器人的焊接仿真,希望能够为相关研究人员提供必要参考.



编辑推荐下载
点焊机焊接变压器的结构特点和设计制造
格式:pdf
大小:23KB
页数:15P
4.5
点焊机焊接变压器的结构特点和设计制造 兰;群谯磊i&考钏 }兰竖一高级程师 (第七0七研究所) i 摘要 本文叙述了点焊机变压器的结构特点.介绍了点焊机变压器铁心和绕组的设计要 点.列举了 点焊机变压器的设计计算方法,强调了点焊机变压器制作的工艺难点 主题词:盘丹;绕组壳式铁0趋表效应绝缘混合物浇注汇流排 l概述 电阻焊机有点焊机,缝焊机和对焊机三 种类型.电阻焊是利用电流流过焊接区的电 阻产生的热量加热的.焊接区所产生的热量, 可用焦耳定律确定: 口一i,0")(1)dt jo 以有效值表示,上式可简化为: 口=12rf 可见,焊接区获得的热量与焊接电流i 的平方,焊接区的总电阻r以及通电时间t 成正比. 为了有效地利用能量,防止过大的加热 变形,电阻焊通常采用低电压,大电流,短时 间的加热方式. 我们目前设计制造的电阻
关于白车身装焊夹具设计及点焊机器人焊接仿真分析热门文档
 关于固定点焊机螺母点焊焊接参数的设计与优化
关于固定点焊机螺母点焊焊接参数的设计与优化 关于固定点焊机螺母点焊焊接参数的设计与优化
格式:pdf
大小:100KB
页数:未知
4.7
在汽车制造领域中,点焊技术是一种非常重要而且应用十分广泛的焊接方式,其参数的设定直接影响了汽车的焊接质量,从而影响到后续的内外饰及整车的装配.但是焊接参数是由多个变量耦合而成,并且不确定因素较多.本课题主要通过控制焊接电流、焊接时间两个参数来控制螺母点焊的焊接参数从而保证产品件焊接质量,而检测主要通过扭矩力和螺母通过率来实现.所以如何设计参数和优化焊接参数也是一项十分重要的课题.
焊装车间机器人焊接优化分析报告 焊装车间机器人焊接优化分析报告
格式:pdf
大小:170KB
页数:未知
4.4
中华工厂车身车间,焊接质量的好坏将直接影响到中华轿车的质量与性能,而生产线设备的正常运行则为整车质量提供着保障。车间030-040工位点焊机器人由于处在过大电流、压力的焊接参数下工作,这些过高的参数给设备的正常运行带来了诸多不利影响。若一个工位发生故障,维修人员需等待另一工位机器人工作完毕方可开安全门进入作业,由于等待延长了维修用时,同时也延长了不必要的停线时间,影响生产运行。
白车车身结构及焊接工艺分析
格式:pdf
大小:205KB
页数:1P
4.7
文章对焊接理论做了基础介绍,然后引申出目前主机厂最常用的点焊、凸焊、二氧化碳焊、螺柱焊等四种焊接工艺形式,并对每种焊接工艺的焊接原理、方法、工艺特点做了重点分析。通过文章的总结可以对白车身结构的焊接工艺有一个宏观的认知和全局上的把握,为今后的白车身结构焊接工艺实践打下坚实基础。
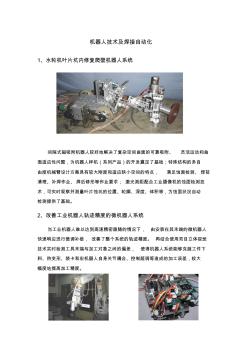
机器人技术及焊接自动化
格式:pdf
大小:952KB
页数:3P
4.8
机器人技术及焊接自动化 1、水轮机叶片坑内修复爬壁机器人系统 间隙式磁吸附机器人较好地解决了复杂空间曲面的可靠吸附、灵活运动和曲 面适应性问题,为机器人样机(系列产品)的开发奠定了基础;特殊结构的多自 由度机械臂设计方案具有较大刚度和适应狭小空间的特点,满足蚀面检测、焊前 清理、补焊作业、焊后修形等作业要求;激光测距配合工业摄像机的蚀面检测技 术,可实时观察并测量叶片蚀坑的位置、轮廓、深度、体积等,为蚀面状况自动 检测提供了基础。 2、改善工业机器人轨迹精度的微机器人系统 当工业机器人难以达到高速精密跟随的情况下,由安装在其末端的微机器人 快速响应进行微调补偿,改善了整个系统的轨迹精度。再结合使用双目立体视觉 技术实时检测工具末端与加工对象之间的偏差,使得机器人系统能够克服工件下 料、热变形、装卡和宏机器人自身关节耦合、控制超调等造成的加工误差,较大 幅度地提高加工精度。 3
自动点焊机的设计
格式:pdf
大小:963KB
页数:37P
4.4
i xx大学 毕业设计(论文) 自动点焊机的设计 所在学院 专业 班级 姓名 学号 指导老师 年月日 ii 摘要 随着工业水平的发展,重要的大型焊接结构件的应用越来越多,其中大量的焊接工作 必须在现场作业,如自动点焊机、大型舰船舱体、甲板的焊接、大型球罐(储罐)的焊接等。 而这些焊接场合下,自动点焊机要适应焊缝的变化,才能做到提高焊接自动化的水平。 无疑,将自动点焊机技术和焊缝跟踪技术结合将有效地解决大型结构件野外作业的自动 化焊接难题。因此自动点焊机的设计对于解决这一难题至关重要。 关键词:焊接技术机构设计强度校核 iii abstract withthedevelopmentofindustriallevel,itisimportanttolarge-scalestructureofthe appli
关于白车身装焊夹具设计及点焊机器人焊接仿真分析精华文档
焊接机器人研究及应用现状
格式:pdf
大小:16KB
页数:5P
4.8
1焊接机器人的发展历程 自从世界上第一台工业机器人unimate于1959年在美国诞 生以来,机器人的应用和技术发展经历了三个阶段: 第一代是示教再现型机器人。这类机器人操作简单,不具备外界信息的反馈 能力,难以适应工作环境的变化,在现代化工业生产中的应用受到很大限制。 第二代是具有感知能力的机器人。这类机器人对外界环境有一定的感知能 力,具备如听觉、视觉、触觉等功能,工作时借助传感器获得的信息,灵活调整 工作状态,保证在适应环境的情况下完成工作。 第三代是智能型机器人。这类机器人不但具有感觉能力,而且具有独立判断、 行动、记忆、推理和决策的能力,能适应外部对象、环境协调地工作,能完成更 加复杂的动作,还具备故障自我诊断及修复能力。 焊接机器人就是在焊接生产领域代替焊工从事焊接任务的工业机器人。早期 的焊接机器人缺乏“柔性”,焊接路径和焊接参数须根据实际作业条件预先设
叉车车架焊接工作中焊接机器人的运用 叉车车架焊接工作中焊接机器人的运用
格式:pdf
大小:97KB
页数:1P
4.7
本文针对叉车车架焊接工作中焊接机器人的运用进行研究,论述了叉车车架焊接工作中焊接机器人的选型与配置,叉车车架焊接工作中焊接机器人的运用,以及焊接机器人在叉车车架焊接工作中的应用效果分析。焊接机器人,能够提高焊接工作的效率,可以持续不间断的工作,有利于提升经济效益。
塔式起重机转台的弧焊机器人焊接技术 塔式起重机转台的弧焊机器人焊接技术
格式:pdf
大小:4.0MB
页数:5P
4.8
针对国内塔机行业大多还在延续手工焊接的生产方式,工人劳动强度大、作业条件差、生产效率低、产品质量不易控制等问题而严重制约企业发展的现象,对弧焊机器人应用于塔机转台的焊接技术进行了初步探讨.搭建了转台机器人焊接工作站,制定了工艺试验方案,并选定了最佳的焊接工艺参数.试验结果表明:采用弧焊机器人焊接塔机转台是行之有效的方法,确保了产品质量和生产效率,使其在实际作业中更安全、更有效、更平稳.
雷达底座机器人焊接的模拟仿真 雷达底座机器人焊接的模拟仿真
格式:pdf
大小:510KB
页数:未知
4.7
雷达底座是整个雷达天线系统中的重要部件,使用kukasimpro仿真软件,对雷达底座进行了机器人焊接的模拟仿真,并与现场实际的焊接过程进行了对比分析,证明了仿真软件的模拟仿真结紧可以用于指导实际产品的机器人焊接。

焊接机器人的外文文献
格式:pdf
大小:1.4MB
页数:6P
4.7
industrialrobot:aninternationaljournal thepranskyinterview:drstevecousins,ceo,savioke,entrepreneurandinnovator joannepransky articleinformation: tocitethisdocument: joannepransky,(2016),"thepranskyinterview:drstevecousins,ceo,savioke,entrepreneurandinnovator",industrial robot:aninternationaljournal,vol.43iss1pp.1-5 permanentlinktothisdocument: http:/
关于白车身装焊夹具设计及点焊机器人焊接仿真分析最新文档

焊接用机器人基本构成
格式:pdf
大小:232KB
页数:5P
4.8
1.2 1-5 1.2 1.2.1 dm350dm500dr350dl350 dm-350dm-500dr-350dl-350 20kva29kva18kva18.2kva 3200/220v±10% 50/60hz co2/mag 350a500a350a350a 36v45v36v36v 30350a30500a30350a30350a 1236v1245v1236v1236v 60%100%60%60% 250×560×370(mm)300×565×595(mm)250×660×370(mm)299×703×596(mm) 25kg49kg31kg55kg d dp350dp500 dp-350dp-500 21.0kva
KUKA机器人闪亮埃森焊接展 KUKA机器人闪亮埃森焊接展
格式:pdf
大小:134KB
页数:1P
4.5
由中国机械工程学会及其焊接分会、中国焊接协会、中国电器工业协会电焊机分会、德国焊接学会和德国埃森展览公司共同主办的第十三届北京埃森焊接与切割展览会已于2008年5月14~17日在北京中国国际展览中心举办。在这一盛会中,
焊接机器人readdata
格式:pdf
大小:20.2MB
页数:27P
4.8
igm믺웷죋쾵춳막럝릫쮾몸뷓믺웷죋쾵춳퓚릤돌믺킵훆퓬튵뗄펦폃놱뺩냬쫂뒦ꎺ놱뺩쫐뎯퇴쟸냋샯컷샯1뫅ꎬ풶퇳쳬뗘61뫅슥2404쫒폊헾뇠싫ꎺ100025tel.:+86-10ꡃ85861789/85861790fax.:+86-10ꡃ85861787e-mail:office@igm-china.com ꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪꆪ몸뷓믺웷죋쾵춳퓚릤돌믺킵훆퓬튵뗄펦폃2/27릤돌믺킵탐튵퓚뛾듎듳햽틔뫳랢햹뫜뿬ꎬ폈웤뷼쪮벸쓪살ꎬ평폚쪩릤릤돌솿뗄죕틦삩듳ꎬ듳탍뿳즽ꆢ쮮뗧ꆢ붻춨ꆢ
视觉系统在机器人焊接中的应用与展望
格式:pdf
大小:396KB
页数:5P
4.8
第24卷 2005年 第11期 11月 机械科学与技术 mechanicalscienceandtechnology vol.24 november no.11 2005 收稿日期:20041026 基金项目:国家自然科学基金项目(50175027)资助 作者简介:刘苏宜(1974-),女(汉),江西,博士研究生 e2mail:irishlsy@163.com 刘苏宜 文章编号:100328728(2005)1121296205 视觉系统在机器人焊接中的应用与展望 刘苏宜,王国荣,钟继光 (华南理工大学,广州 510640) 摘 要:随着焊接生产自动化和智能化程度的提高,视觉系统在机器人焊接中的重要性日益凸显。本文简述了机器 人焊接中视觉系统的分类、原理、特点及适用性,综述了视觉系统在机

《焊接机器人》试卷
格式:pdf
大小:284KB
页数:4P
4.7
2015~2016学年第一学期14中职焊2班《焊接机器人》试卷 姓名:班级:_________________学号__________ 1 密封线 题号一二三四五六合计审核 得分 阅卷人 一、填空题(每空1分,共25分) 1、“机器人”,英文单词,起源于捷克作家 2、国际上的机器人主要分为日系和。 3、根据预先编制的操作程序自动重复工作的自动化机器,所以这种机器人也称为。 4、工业机器人的控制方式包含和位置控制两种。 5、工业机器人的运动精度主要包括和重复定位精度。 6、模式选择按钮主要分为和手动模式 7、突然停电后,要手动及时关闭机器人的主电源和。 8、发生火灾时,应使用灭火器。 9、表示操作。 10、abb机器人具有线性运动、和单轴运动。 二、单项选择(每题2分,共20分) 1、示教再现型机器人属于。 a
机器人焊接铝合金工艺 机器人焊接铝合金工艺
格式:pdf
大小:130KB
页数:1P
4.4
机器人焊接在目前的生产应用中起到了关键作用,家具生产十分依赖机器人焊接,它对于企业的产能、生产效率、劳动条件等方面有很大的影响,但其操作过程难度极大。机械人铝合金焊接技术更大的困难在于焊接装配的精确性,掌握机器人焊接技术最重要的就是,工件固定的自动焊接方法,本文综合针对一些铝合金椅子的焊接难点问题,探讨机器人铝合金固定焊接工艺。
弧焊机器人焊接双压智能环网柜气箱的技术 弧焊机器人焊接双压智能环网柜气箱的技术
格式:pdf
大小:481KB
页数:5P
4.5
随着先进制造技术的发展,采用机器人实现焊接过程自动化、柔性化与智能化已成为必然趋势。近年来,我国焊接机器人的应用主要集中在汽车和摩托车等行业。在电力开关装备行业中,为了保证柜体或箱体的焊接强度、精度及焊缝致密性达到国家gis开关柜的标准要求,国内先进企业采用了弧焊机器人与cmt焊接技术代替传统的mig/mag焊接技术,从而提高了产品质量和生产效率。本文采用机器人焊接的工艺与结构等对柜式气体绝缘设备(c-gis)进行设计和分析,在试验的基础上确定了工艺参数,并组织实施。
点焊机对焊机常见故障及处理方法
格式:pdf
大小:6KB
页数:2P
4.4
点焊机对焊机常见故障及处理方法 1.焊接时出现不应有的飞溅: 先问是不是经常用的点焊机还是偶尔用一次,检查电极头是否氧 化严重。 焊接工件不能锈的太厉害,检查焊接工件是否严重锈蚀接 触不良。 工人的熟练程度不一样,焊接工件的时候电流越大焊接时间 越短,如电流过大,焊接时间过长,就要调节一下焊接电流,或缩短焊接时间。 检查电极压力是否太小,焊接程序是否正确。焊接程序 是先压紧后给电,检查一下行程开关的行程,一般建议两个焊接电极接触在一起 后,行程开关的距离保持在5mm至10mm之间 焊点压痕严重并有挤出物:(就是焊接完成以后表面烧伤严重,有坑) 检查电流是否过大。或压力太小。电流过大会影响焊接 工件的表面焊接效果,压力太小会出现挤出物,有一般要做到表面无烧伤而且焊 接牢固就要推荐气动大功率的点焊机(100kva气动点焊机) 检查焊接工件是否有凹凸不平。 2.
 探讨汽车白车身焊接工艺及质量检验分析
探讨汽车白车身焊接工艺及质量检验分析 探讨汽车白车身焊接工艺及质量检验分析
格式:pdf
大小:440KB
页数:1P
4.4
随着社会经济的发展,汽车逐渐成为现代社会重要交通工具,其中汽车白车身作为汽车主要组成部分,是整个汽车零部件的载体,如何保障白车身的焊接质量对于整车的质量、性能及生产率都有重要意义.本文主要从影响白车身焊接工艺质量的影响因素出发,分析了汽车白车身焊接工艺设计,最后对白车身焊接后的质量检验方法进行了探究.
关于白车身装焊夹具设计及点焊机器人焊接仿真分析相关
文辑推荐
知识推荐
百科推荐


职位:纳米材料安全性评价工程师
擅长专业:土建 安装 装饰 市政 园林


